Hi all,
Meanwhile, here is my version (for now):
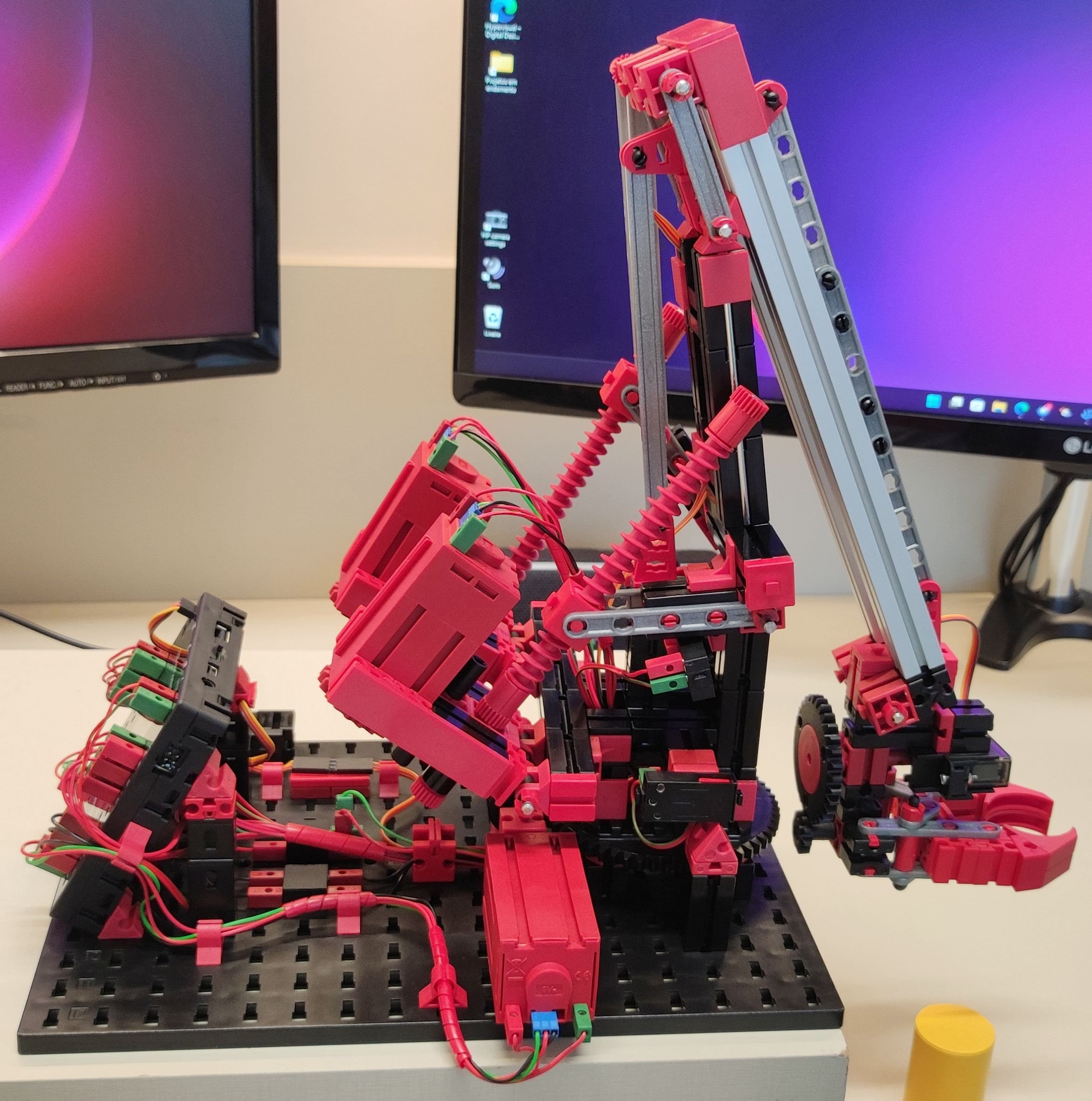
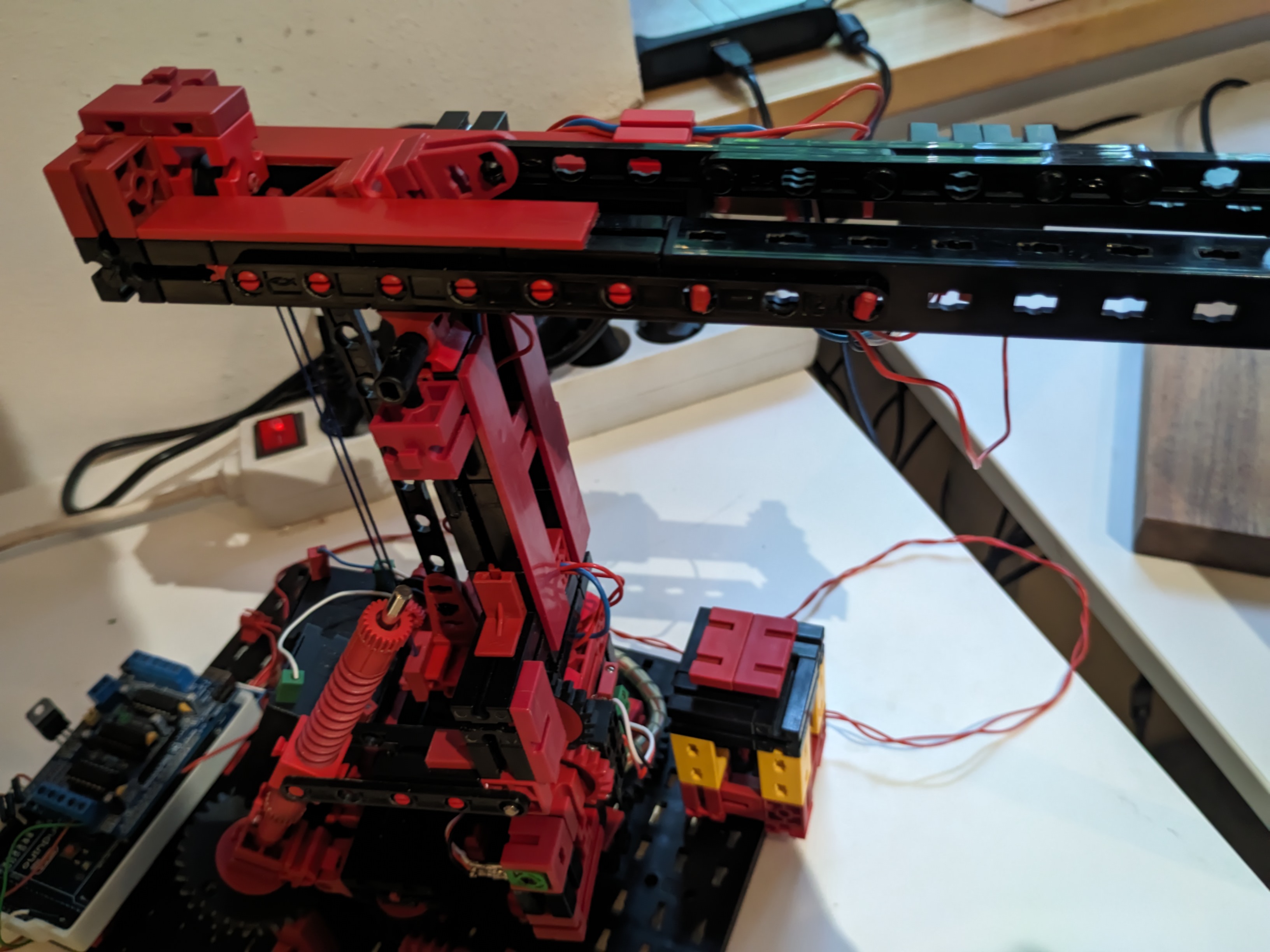
- Traning robot.jpg (698.45 KiB) 37 mal betrachtet
I'm using a different approach. I'm trying to replicate the original as closely as possible but use only modern, easily available parts. The most obvious exceptions are the aluminium beams, but these can easily be replaced with statics, as you are already doing. I decided for a TXT 4.0 with encoder motors, which avoids the need for custom encoders. Other alu beams in the original are replaced with standard B30 blocks reinforced with steel axles and blocks 5 at the ends. A really exotic component is the 3D printer's sleeve 160549 which I use to couple the servo to the axle that drives the Z30 gear in the gripper mechanism... But I'm not satisfied with the gripper anyway, so maybe I'll break my own "pure ft" rule and use Simon's gripper which is such a brilliant idea

. A solution using a mini-motor and two switches would be too bulky, but maybe I'll give it a try as well. Let's see. Another point I still don't like about my project is that the slewing ring rotates too slowly because a Z20 gear (like the ones used in the other motors to double the speed) hits the Z10 gear's collets.
Any comments and suggestions will be much appreciated!
Many thanks (again) and best regards,
Rubem
----------------------------------- Google Translate
Hallo zusammen,
Hier ist meine Version (vorerst):
[Bild]
Ich gehe einen anderen Weg. Ich versuche, das Original so genau wie möglich nachzubilden, verwende aber nur moderne, leicht erhältliche Teile. Die offensichtlichsten Ausnahmen sind die Aluminiumträger, die aber problemlos durch Statikteile ersetzt werden können, wie ihr es bereits tut. Ich habe mich für einen TXT 4.0 mit Encodermotoren entschieden, wodurch keine speziellen Encoder benötigt werden. Andere Aluminiumträger im Original wurden durch Standard-B30-Blöcke ersetzt, die mit Stahlachsen und Blöcken 5 an den Enden verstärkt sind. Ein wirklich exotisches Bauteil ist die Hülse 160549 aus dem 3D-Drucker, mit der ich das Servo mit der Achse verbinde, die das Z30-Zahnrad im Greifermechanismus antreibt... Aber ich bin mit dem Greifer sowieso nicht zufrieden, also breche ich vielleicht meine eigene „Pure-Foot“-Regel und verwende Simons Greifer – eine wirklich brillante Idee
. Eine Lösung mit einem Minimotor und zwei Schaltern wäre zu sperrig, aber vielleicht probiere ich es auch mal. Mal sehen. Ein weiterer Punkt, der mir an meinem Projekt noch nicht gefällt, ist, dass sich der Drehkranz zu langsam dreht, weil ein Z20-Zahnrad (wie es in den anderen Motoren zur Verdoppelung der Geschwindigkeit verwendet wird) auf die Spannzangen des Z10-Zahnrads trifft.
Für Kommentare und Vorschläge bin ich sehr dankbar!
Vielen Dank (nochmals) und beste Grüße,
Rubem