Hallo,
ich will meinen alten FT-Teach-in-Roboter (etwa 1980; Bild: https://i.ytimg.com/vi/yVzK3VaYxS8/maxresdefault.jpg) verschenken. Habe dazu ein ftduino-Interface gekauft und möchte anstatt der alten Motoren mit Gabel-Lichtschranken für den Hauptantrieb Endocermotoren verwenden. Die alten (grauen) Motoren saßen mit einem Schneckenantrieb auf den entsprechenden Getrieben. Die neuen (roten) Motoren (153422) haben ein eingebautes Getriebe und eine doppelt abgeflachte 4mm-Welle.
Mit welchen Teilen könnte man die neuen Motoren mit dem alten Getriebe des Roboters verbinden. Ich bin für jeden Tipp dankbar, am besten mit Bild.
Dietrich
Alter FT-Roboter - neue Encoder-Motoren
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
{kind=link}
-
fishfriend

- Beiträge: 2413
- Registriert: 26 Nov 2010, 11:45
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo...
Ich denke mit den schnellen Zählern hast du ein Problem, da vermutlich zu wenige drinn sind.
Ich sehe aber keine Notwendigkeit andere Motoren zu nehmen.
Mit freundlichen Grüßen
Holger
Ich denke mit den schnellen Zählern hast du ein Problem, da vermutlich zu wenige drinn sind.
Ich sehe aber keine Notwendigkeit andere Motoren zu nehmen.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo,
es gibt einen Diskussions-Thread zum Thema Trainingsroboter, wo einige Möglichkeiten der Verwendung von XM- bzw. Encodermotoren beschrieben sind.
Eine Möglichkeit ist diese:
Grüße
Florian
EDIT: PS: was die Zählung anbetrifft: soweit ich sehe, können bis zu 8 Pin-Change-Interrupts konfiguriert werden. Da die Standard-Encoder-Motoren aber kein Quadratur-Signal ausgeben, könnte es zu einem kumulierenden Positionsfehler kommen. Man könnte für jeden Motor einen Taster oder eine Lichtschranke für Nullposition vorsehen.
Theoretisch könntest Du an der Achse des Z30 das Encoder-Rad anbringen und das Signal entweder für Steuerung oder Fehlerkorrektur auswerten.
es gibt einen Diskussions-Thread zum Thema Trainingsroboter, wo einige Möglichkeiten der Verwendung von XM- bzw. Encodermotoren beschrieben sind.
Eine Möglichkeit ist diese:
- TR031.JPG (66.57 KiB) 3228 mal betrachtet
Florian
EDIT: PS: was die Zählung anbetrifft: soweit ich sehe, können bis zu 8 Pin-Change-Interrupts konfiguriert werden. Da die Standard-Encoder-Motoren aber kein Quadratur-Signal ausgeben, könnte es zu einem kumulierenden Positionsfehler kommen. Man könnte für jeden Motor einen Taster oder eine Lichtschranke für Nullposition vorsehen.
Theoretisch könntest Du an der Achse des Z30 das Encoder-Rad anbringen und das Signal entweder für Steuerung oder Fehlerkorrektur auswerten.
-
fishfriend
- Beiträge: 2413
- Registriert: 26 Nov 2010, 11:45
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo...
Ja, irgendwie hatte ich an den Arduino Uno gedacht, der hat zuwenige schnelle Zähler.
Ich bin mir auch nicht sicher, ob das auch mit dem TX-Light, also dem steuern vom Ftduino über Robo Pro geht. Ist zulange her, das ich das mal ausprobiert habe.
Mit dem Ftduino und einem Arduino-Programm sollte es gehen.
Warum willst du andere Motoren nehmen? Du kannst die kleinen grauen Motoren auch an dem Ftduino betreiben.
Mit freundlichen Grüßen
Holger
Ja, irgendwie hatte ich an den Arduino Uno gedacht, der hat zuwenige schnelle Zähler.
Ich bin mir auch nicht sicher, ob das auch mit dem TX-Light, also dem steuern vom Ftduino über Robo Pro geht. Ist zulange her, das ich das mal ausprobiert habe.
Mit dem Ftduino und einem Arduino-Programm sollte es gehen.
Warum willst du andere Motoren nehmen? Du kannst die kleinen grauen Motoren auch an dem Ftduino betreiben.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: Alter FT-Roboter - neue Encoder-Motoren
Danke für die Tipps. Ich habe inzwischen Wellenkupplungen (4mm auf 4mm) erstanden. Ist zwar etwas sperrig, aber es funktioniert. Die alten Gabellichtschranken (5 V) funktionieren am ftduino nicht als Impulsgeber. Ich habe sie mit einem Spannungswander (5V) betrieben, aber die ftduino-Zählereingänge erkennen das Signal nicht.
-
fishfriend
- Beiträge: 2413
- Registriert: 26 Nov 2010, 11:45
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo...
Wie hast du denn die angeschlossen?
Es gibt die Schaltungen:
https://www.ftcommunity.de/bilderpool/b ... upload.jpg
Und die Verbindung zu 9V (ffm) mit
https://www.fischerfriendsman.de/normalos/7560sp.jpg
Ansonsten würde ich mal 2x 10k nehmen und mit Pullup und Pulldown Widerständen experimentieren. OK, für sehr "hohe" Frequenzen weniger geeignet, sollte aber gehen und man kann nichts kaputtmachen.
Mit freundlichen Grüßen
Holger
PS Ansonsten mal die EIngangsschaltung anschauen, wie die aufgebaut ist. Ich kann mir nicht vorstellen, das es so schwierig sein sollte.
Und ansonsten mal den mal den Till Harbaum anschreiben.
Wie hast du denn die angeschlossen?
Es gibt die Schaltungen:
https://www.ftcommunity.de/bilderpool/b ... upload.jpg
{kind=link}
Und die Verbindung zu 9V (ffm) mit
https://www.fischerfriendsman.de/normalos/7560sp.jpg
{kind=link}
Ansonsten würde ich mal 2x 10k nehmen und mit Pullup und Pulldown Widerständen experimentieren. OK, für sehr "hohe" Frequenzen weniger geeignet, sollte aber gehen und man kann nichts kaputtmachen.
Mit freundlichen Grüßen
Holger
PS Ansonsten mal die EIngangsschaltung anschauen, wie die aufgebaut ist. Ich kann mir nicht vorstellen, das es so schwierig sein sollte.
Und ansonsten mal den mal den Till Harbaum anschreiben.
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: Alter FT-Roboter - neue Encoder-Motoren
Danke für die Infos und die Schaltbilder, fishfriend. Die Schaltung mit dem Transistor ist auf jeden Fall einen Versuch wert. Ich konnte das Signal der Lichtschranken am Oszi erkennen - allerdings reagierten die ftduino-Zähleingänge nicht.
-
fishfriend
- Beiträge: 2413
- Registriert: 26 Nov 2010, 11:45
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo...
Ist schon länger her, dass ich mit dem ftduino was gemacht habe.
Die Programmierung der schnellen Zähler noch länger...
Ich meine aber, dass man z.B. auch die Flanke oder beide angeben muss, worauf der reagieren soll.
Im Grunde ist es einezusätzliche Hardware,die unabhängig vom Programm läuft. Man stellt es einmal ein und dann fragt man die Zähler ab.
Ich meine man muss auch den Überlauf beachten bzw/oder auf 0 setzen. Ich halt die Frage wie man das programmiert.
Wieviele Zähler man hat ist stark vom verwendeten Prozessor abhängig. Ich meine der UNO hat nureinen. Bei Leonardo oder ftduino muss man nachschauen. Auch auf welchen Pins die rausgeführt werden und welche das dann beim ftduino sind.
Nutzt du die Lib für den ftduino oder machst du was eigenes?
Mit freundlichen Grüßen
Holger
Ist schon länger her, dass ich mit dem ftduino was gemacht habe.
Die Programmierung der schnellen Zähler noch länger...
Ich meine aber, dass man z.B. auch die Flanke oder beide angeben muss, worauf der reagieren soll.
Im Grunde ist es einezusätzliche Hardware,die unabhängig vom Programm läuft. Man stellt es einmal ein und dann fragt man die Zähler ab.
Ich meine man muss auch den Überlauf beachten bzw/oder auf 0 setzen. Ich halt die Frage wie man das programmiert.
Wieviele Zähler man hat ist stark vom verwendeten Prozessor abhängig. Ich meine der UNO hat nureinen. Bei Leonardo oder ftduino muss man nachschauen. Auch auf welchen Pins die rausgeführt werden und welche das dann beim ftduino sind.
Nutzt du die Lib für den ftduino oder machst du was eigenes?
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
-
fishfriend
- Beiträge: 2413
- Registriert: 26 Nov 2010, 11:45
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo...
Hab gerade durch Zufall was gefunden.
Beim TX Light Programmfür den ftduino hatte ich 4 schnelle Zähler programmiert.
Das ging auch über die Lib.
Ich hatte aber keine der alten Lichtschranken ausprobiert. Auch ist ja dann noch Robo Pro dazwischen, was das die Auswertung langssamer macht.
"Normale" ft-Modelle funktionieren aber damitauf jeden Fall.
Wenn man "nur" C++ Arduino programmiert, ist die Auswertung wesendlich schneller.
Mit freundlichen Grüßen
Holger
Hab gerade durch Zufall was gefunden.
Beim TX Light Programmfür den ftduino hatte ich 4 schnelle Zähler programmiert.
Das ging auch über die Lib.
Ich hatte aber keine der alten Lichtschranken ausprobiert. Auch ist ja dann noch Robo Pro dazwischen, was das die Auswertung langssamer macht.
"Normale" ft-Modelle funktionieren aber damitauf jeden Fall.
Wenn man "nur" C++ Arduino programmiert, ist die Auswertung wesendlich schneller.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo Dietrich,
zur Verwendung der Gabellichtschranken mit TXT oder ftduino hatte ich in der zweiten Hälfte meines Artikels
in der ft:pedia 2021/3 ab Seite 70 (die Gabellichtschranke dann ab Seite 71) mal recht erfolgreiche Versuche gemacht.
Hier mal die Schaltung:
..und ein wenig Code für den ftduino:
Die verwendete Gabellichtschranke sowie das rote Walzenrad mit 32 Pulsen pro Umdrehung haben einwandfrei funktioniert, und natürlich sollte das auch mit drei Walzenrädern klappen.
Liebe Grüße aus Braunschweig,
Matthias (fiten3rd)
zur Verwendung der Gabellichtschranken mit TXT oder ftduino hatte ich in der zweiten Hälfte meines Artikels
in der ft:pedia 2021/3 ab Seite 70 (die Gabellichtschranke dann ab Seite 71) mal recht erfolgreiche Versuche gemacht.
Hier mal die Schaltung:
- Gabellichtschranke.jpg (187.94 KiB) 2343 mal betrachtet
- ftDuino_HP.jpg (77.27 KiB) 2343 mal betrachtet
Liebe Grüße aus Braunschweig,
Matthias (fiten3rd)
Re: Alter FT-Roboter - neue Encoder-Motoren
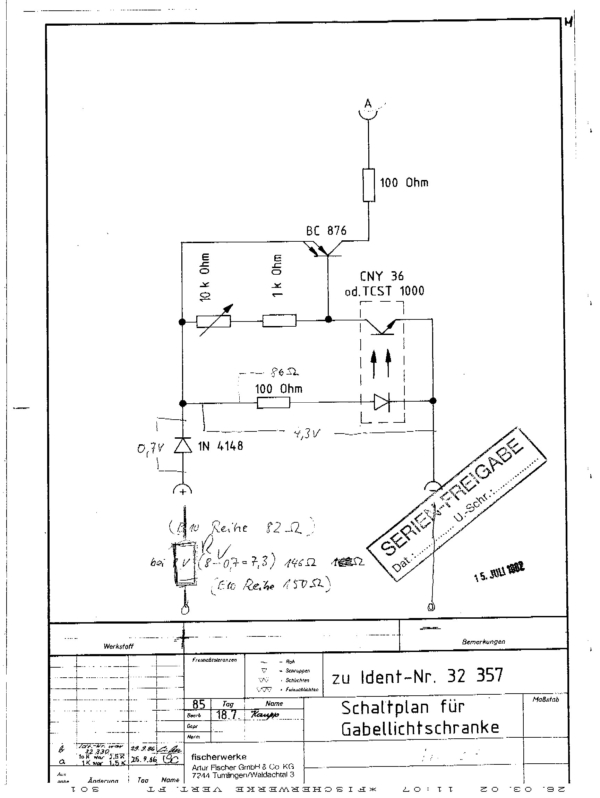
Danke für all die Tipps. Ich war zunächst etwas vorsichtig, weil ich ein wenig Angst hatte um das ftduino-Interface. Als ich dann aber die Counter-eingänge mit einem FT-Taster kurzgeschlossen hatte und vernünftige Zählerergebnisse bekam (offenbar gibt es PullUp-Widerstände an den Zählereingängen) habe ich dann mutig die Schaltung von fishfriend nachgebaut.
Mit dem Vorwiderstand 150 Ohm bekommt die GLS ihre 5V aus den 9V des ftduino-Interfaces. Bei der Verstärkung des Signals der GLS muss man je nach Transistor ein wenig mit dem Basis-Widerstand experimentieren. Dann kann man den Kollektor des Transistors direkt mit dem Counter-Eingang verbinden - die internen PullIps sorgen für vernünftige Potentiale. Man kann dann für ftduino . counter_set_mode ( C1 , Ftduino :: C_EDGE_XXXX ) ; jeden mode nehmen, bei XXX = ANY bekommt natürlich den doppelten Zählwert. In meinem Testprogramm lass ich einfach den Motor ein paar Sekunden laufen und bekomme gut reproduzierbare Werte. Jetzt muss ich für den Roboter die Schaltung in dreifacher Ausführung aufbauen.
Der Trainingsroboter hat für alle drei in Frage kommenden Motoren Endabschalter, die man als Nullpunkte für die Zähler nehmen kann. Dann kann man mit einem programm-internen Zähler die Rechts- und Linksbewegungen kontrollieren und kommt so auf eine hinreichende Präzision.
Eine Frage an FiTeN3Rd: Wie kommt man an deinen Artikel? Online oder als Papierausgabe?
Mit dem Vorwiderstand 150 Ohm bekommt die GLS ihre 5V aus den 9V des ftduino-Interfaces. Bei der Verstärkung des Signals der GLS muss man je nach Transistor ein wenig mit dem Basis-Widerstand experimentieren. Dann kann man den Kollektor des Transistors direkt mit dem Counter-Eingang verbinden - die internen PullIps sorgen für vernünftige Potentiale. Man kann dann für ftduino . counter_set_mode ( C1 , Ftduino :: C_EDGE_XXXX ) ; jeden mode nehmen, bei XXX = ANY bekommt natürlich den doppelten Zählwert. In meinem Testprogramm lass ich einfach den Motor ein paar Sekunden laufen und bekomme gut reproduzierbare Werte. Jetzt muss ich für den Roboter die Schaltung in dreifacher Ausführung aufbauen.
Der Trainingsroboter hat für alle drei in Frage kommenden Motoren Endabschalter, die man als Nullpunkte für die Zähler nehmen kann. Dann kann man mit einem programm-internen Zähler die Rechts- und Linksbewegungen kontrollieren und kommt so auf eine hinreichende Präzision.
Eine Frage an FiTeN3Rd: Wie kommt man an deinen Artikel? Online oder als Papierausgabe?
- GLS02.jpg (53.91 KiB) 58 mal betrachtet
- GLS01.jpg (44.24 KiB) 58 mal betrachtet
Re: Alter FT-Roboter - neue Encoder-Motoren
Hallo Dietrich,
ich habe den Artikel mit pdf24 dem creator (kostenfrei herunterzuladen) aus der ftpedia 2021-3 ausgeschnitten und würde ihn gerne übersenden. Der Dateianhang ist diesem Programm aber zu groß. Schickst Du mir über PN bitte Deine email-Adresse, dann sende ich Dir den Artikel per mail und als PDF zu.
Im Moment habe ich mein Faible für "Uralt-Modelle" (Uralt - auch noch aus dem letzten Jahrtausend) weiter ausgelebt, und habe zuletzt tatsächlich den Plotter mit einem XP-Notebook (mit paralleler Schnittstelle!) angeworfen bekommen. Artikel soll bald folgen.
Liebe Grüße aus Braunschweig,
Matthias
ich habe den Artikel mit pdf24 dem creator (kostenfrei herunterzuladen) aus der ftpedia 2021-3 ausgeschnitten und würde ihn gerne übersenden. Der Dateianhang ist diesem Programm aber zu groß. Schickst Du mir über PN bitte Deine email-Adresse, dann sende ich Dir den Artikel per mail und als PDF zu.
Im Moment habe ich mein Faible für "Uralt-Modelle" (Uralt - auch noch aus dem letzten Jahrtausend) weiter ausgelebt, und habe zuletzt tatsächlich den Plotter mit einem XP-Notebook (mit paralleler Schnittstelle!) angeworfen bekommen. Artikel soll bald folgen.
Liebe Grüße aus Braunschweig,
Matthias