
Take a look at my new line follower robot KUBIKUS. This robot uses machine vision software running on Android powered smpartphone to trace a path.
01. The robot

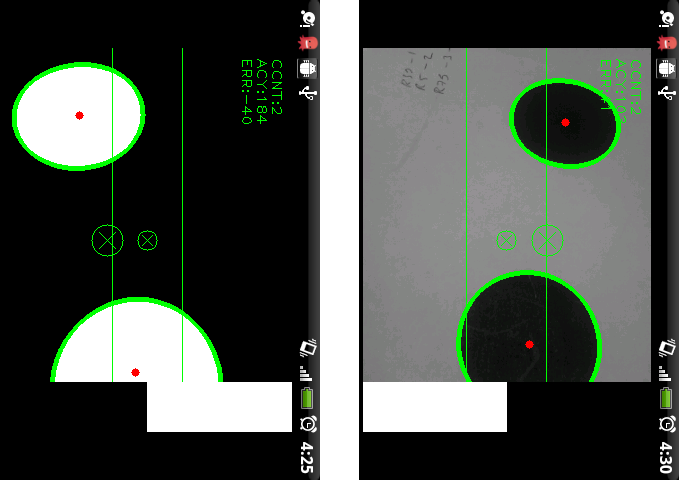
02. Screen capture from HTC
03. KUBIKUS at work - youtube video.
More at my blog.
Defiant hat geschrieben:Is that HW accelerated (like ducati?) OpenCV?
And do you have a human readable version of your blog?
Defiant hat geschrieben:Not even details on the algorithm used?
