Hallo Holger,
was ich zum Integrieren brauche, ist ein I2C Adapter. Alles andere ist Software.
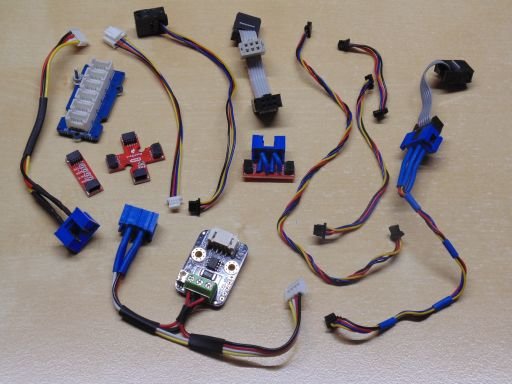
- DSC00787_512.JPG (37.54 KiB) 11227 mal betrachtet
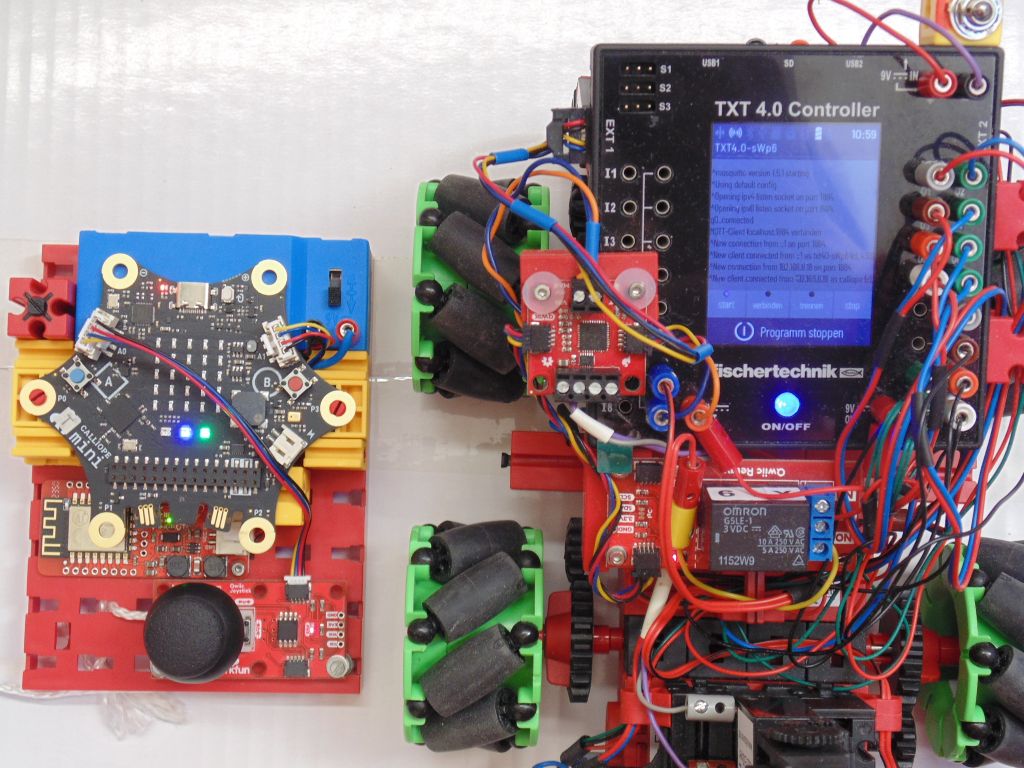
Den Qwiic Motor Chip noch an 9V anstecken und schon kann ich mehr als 4 Motoren steuern. Das I2C Relais schaltet das Licht. Es ist ja mit 4 Encodermotoren kein Ausgang frei.
Mit Bluetooth funktioniert das nicht. MQTT braucht WLAN. Das hat der TXT 4.0 Controller aber alles.
https://elssner.github.io/MQTT-Fernbedi ... pler/mqtt/
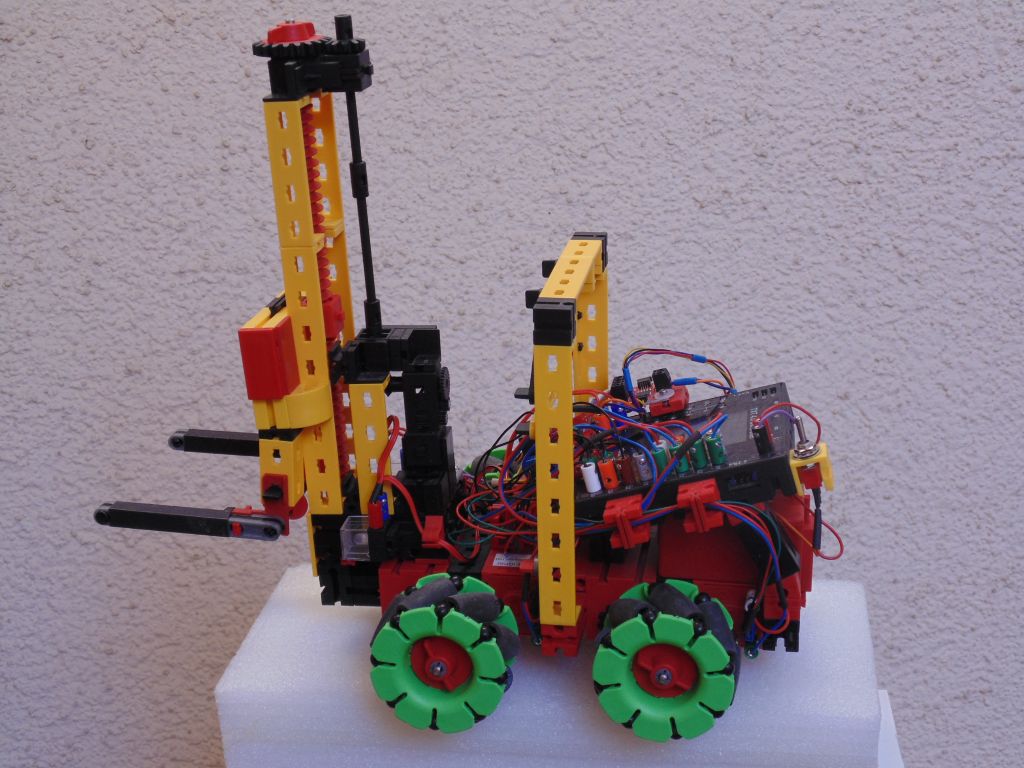
Macht richtig Spaß. Ich habe heute mehrere Stunden Paletten gestapelt. Mit Knopf A, Knopf B, Joystick und den Calliope neigen in alle Richtungen.
Damit ich mein Modell auch nächste Woche noch bedienen kann, habe ich es mir aufgeschrieben:
https://elssner.github.io/MQTT-Fernbedi ... elstapler/
Mit Fernsteuerungen habe ich Erfahrung. Vielleicht kommt 2026 der pneumatische Bagger dazu. Die Kinder im Gymnasium bauen den schon...
FG Lutz