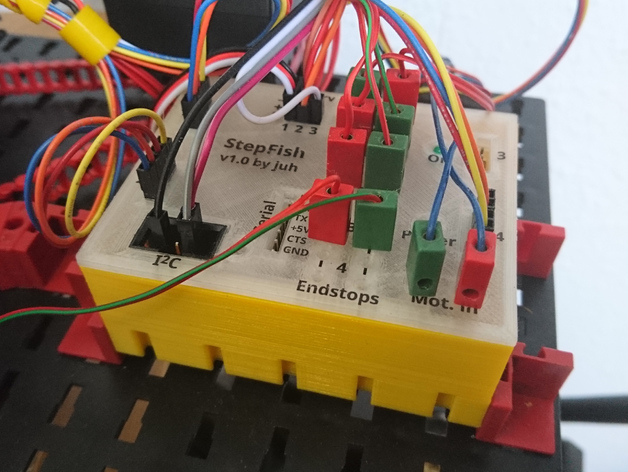
der ftPwrDrv-Controller ist bereits vorbestellbar und wohl kurz vor der Auslieferung. Mich reizt aber nun mal das Selbermachen, daher hier meine eigene Lösung. Sie ist theoretisch nachbaubar, aber gegenüber dem ftPwrDrv-Controller (und der Lösung von Frans) software-seitig und wahrscheinlich auch hardware-seitig eher im Nachteil. Pluspunkt ist aber der schönere Name: StepFish
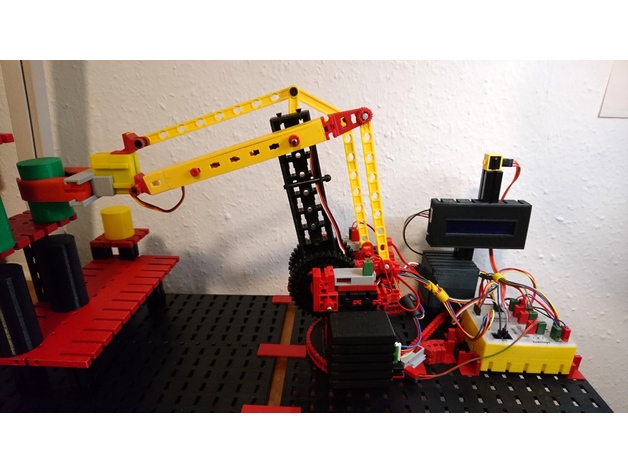
Beim trainierbaren Roboterarm (hier ein aktuellerer Video), den ich als Demonstrator aufgebaut habe, dient StepFish mit einem Arduino-Bootloader als standalone Controller für die Minebea-Stepper und den Servo-Greifer und als I2C master, der das LCD steuert. Die Bedienung erfolgt über eine kleine IR-Fernbedienung, der Empfänger ist an einem der drei frei verwendbaren Pins angeschlossen, ein weiterer Pin treibt den Greifer-Servo. Perspektivisch soll StepFish aber als I2C-Slave arbeiten, ich arbeite noch an einem I2C-wrapper für die AccelStepper-Library.
Auf thingiverse finden sich nicht nur die .STLs für das Gehäuse sondern auch eine ZIP mit den Dateien zum Herstellen der einseitigen Platine. Deren Bestückung ist tricky, da die Anschlusspins auf der Kupferseite angebracht sind. Sollte tatsächlich jemand an einem Nachbau interessiert sein, bitte kontaktiert mich hier per PM oder auf thingiverse, dann liefere ich Details nach.
https://www.thingiverse.com/thing:3537610
lg
Jan



