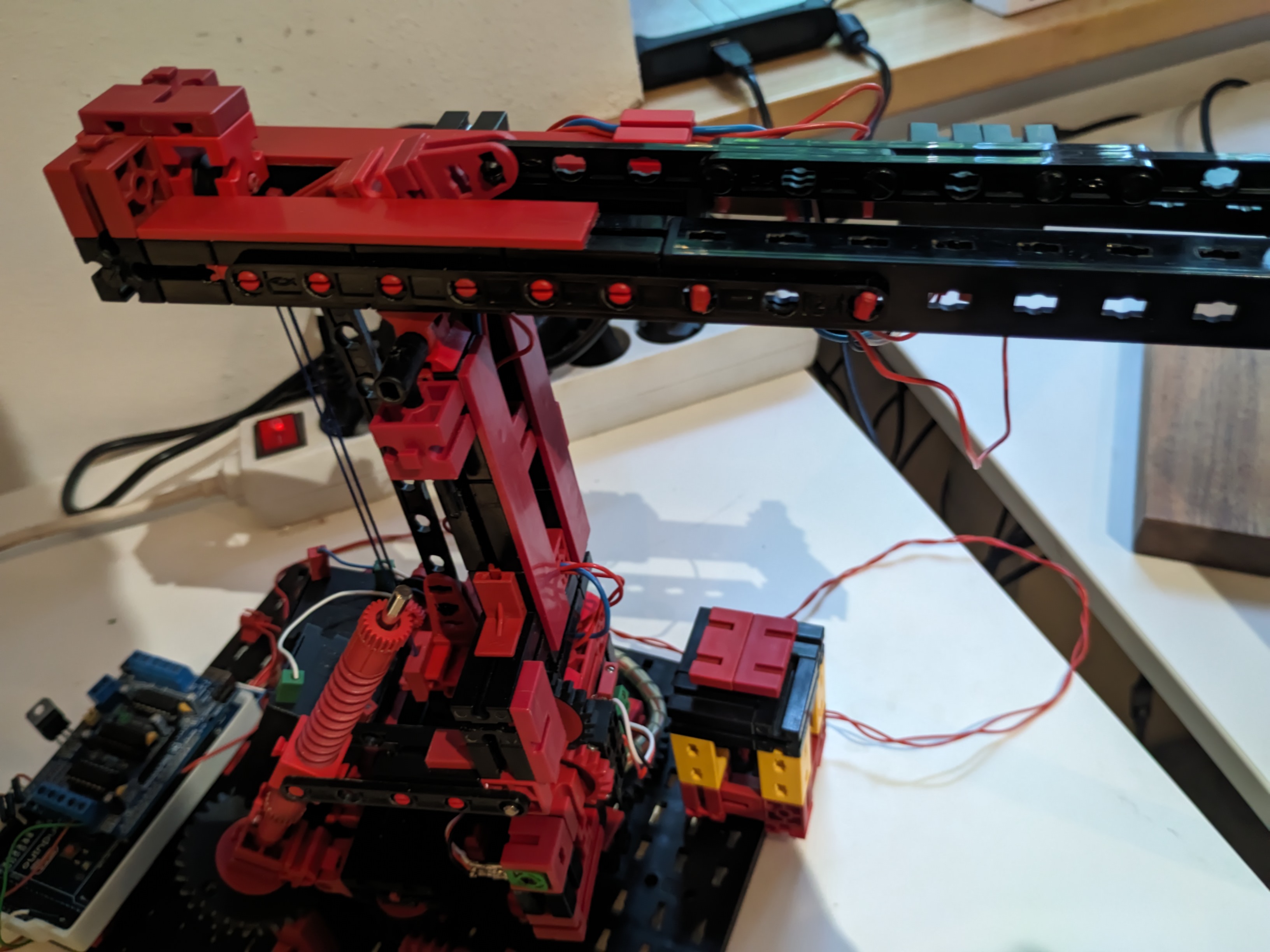
Simon's Vorschlag ist "betörend". Daher habe ich ihn gleich mal ausprobiert und habe dabei Jan's Potentiometerhalter gedruckt und eingesetzt.
Da diese Potentiometer auf 270 Grad ausgelegt sind, ist die Auflösung nicht so gut wie bei der Lösung mit dem Servo-Potentiometer. Müsste man ggf. noch eine Übersetzung einbauen. (Was natürlich auch elektronisch ginge)
- TR2.JPG (50.26 KiB) 496 mal betrachtet
- TR1.JPG (53.49 KiB) 496 mal betrachtet
Allerdings werde ich vermutlich auf Magnet-Encoder umrüsten. Die haben eine höhere Auflösung und ich muss nicht mit Übersetzungen arbeiten.
Hier wie das beim unteren Arm aussehen könnte:
- TR3.JPG (58.93 KiB) 496 mal betrachtet