Hallo Jan,
Elektronenmikroskop wird das nicht. Aber ich bin auf dem Weg, um Verstellungen im Bereich von optischen Wellenlängen zu realisieren. Endlich mal, was schon lange auf meiner ToDo-Liste war: Verstellung mit Voice-Coil. Längenmessung mit dem Magnet-Array und Ansteuerung der Voice-Coil mit PWM, Regelung wieder mit PID:
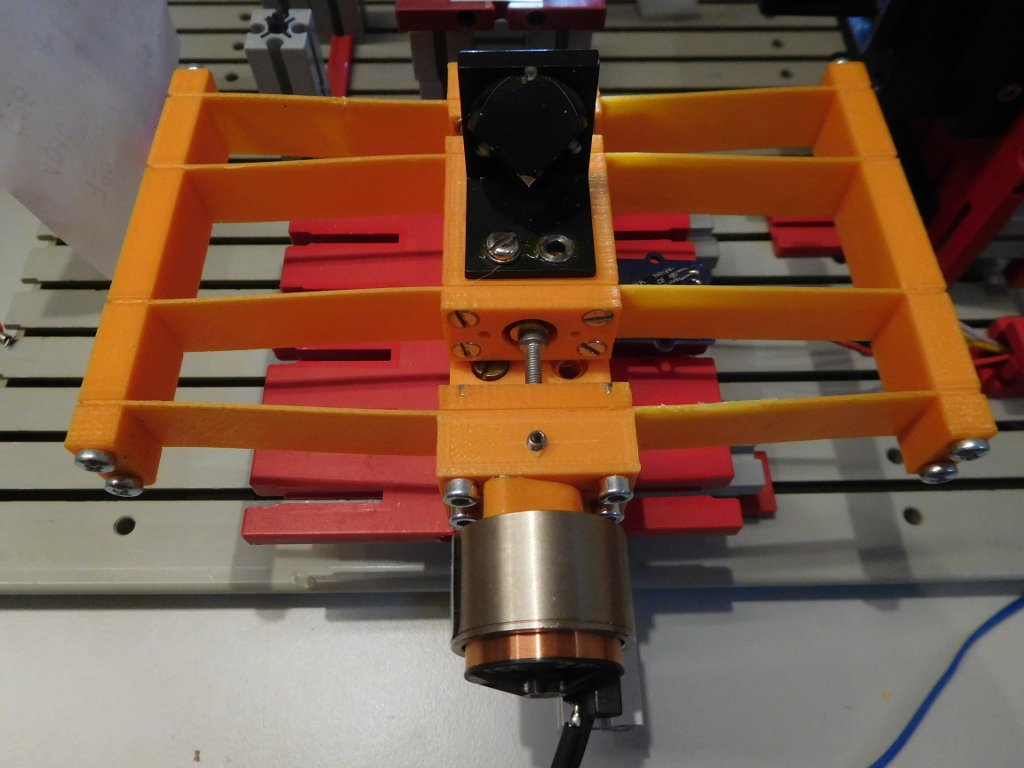
- MM1.JPG (109.26 KiB) 1800 mal betrachtet
Der Drück-Mechanismus ist noch etwas schlampig. Aber im Prinzip funktioniert es schon.
Folgendes Experiment hat geklappt:
1. Baue Mikrometerschraube ein
2. Justiere Interferometer auf Weißlichtposition
3. Merke den Encoder-Wert
4. Baue auf Voice-Coil um
5. Setze Regler auf den ausgelesenen Enocer-Wert
=> Weißlichtposition wird gefunden: Bunte Interferenzmuster erscheinen
Vielleicht ginge es mit Minimotor mit Getriebe, der dann "am Rad dreht". Blöd halt nur, dass sich das Rad axial verschiebt.
Oder klassisch: 2 Muttern auf dem Schlitten und eine lange Gewindestange verwenden. Braucht man halt wieder Kugellager und Befestigungen dafür.
Grüße
Florian


