
Hallo Claus,
ein wunderschönes Modell...
Das glaube ich Dir sofort, dass mit den Schrittmotoren "die Post" abgeht.
Herzlicher Gruß
Dirk
Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Hallo Dirk,
danke für die Blume, daß Lob kann ich nur zurückgeben. Ich habe ja nur von euch abgekupfert.
danke für die Blume, daß Lob kann ich nur zurückgeben. Ich habe ja nur von euch abgekupfert.

Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Das kenne ich!
Ich habe damals keine Einschränkungen vorgenommen. Bei den Spielen (Solitär, Tic-Tac-Toe) rechnen wir die Potentiometerdaten ja überhaupt nicht in kartesischen Koordinaten um. Die Winkelkoordinaten eignen sich nicht, um passende Ungleichungen anzugeben. Wenn man aber eine Anwendung hat, bei der man kartesische Koordinaten verwendet, ist es sicher eine gute Idee, die vertikale Bewegung einzuschränken.Wie könnte man sinnvoll den Arbeitsraum einschränken, damit es nicht mehr zu Kollisionen kommen kann?
Wenn Du den Delta mit Schrittmotoren zum Laufen bekommen hast, hast Du schon viel geleistet! Die Schrittmotoren sind natürlich viel besser, um die Hand von einer Position zur anderen geradlinig zu führen. Das ist mit den S-Motoren aufgrund der nicht garantierten gleichen Drehzahl bei gleicher Spannung viel schwieriger. Andererseits musst Du mit Schrittmotoren die Positionen anders anlernen. Wie machst Du das denn?
Und zum Schluss: Woher hast Du so viele schicke schwarze Schneckenmuttern?
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Ich schätze mal daher, wo auch die anderen schwarzen Teile herkommen.
vg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Jan hat recht, die Schneckenmuttern sind aus meinem 3D-Drucker gefallen.
Als erstes fahren die Arme gegen den oberen Anschlag, dazu sind Endtaster montiert. Diese Position ist die Ausgangslage. Die Schrittzähler der Motoren werden auf 0 gesetzt. Alle Bewegungskommandos beziehen sich absolut auf diesen Punkt. Gleichzeitig ist dort auch der Bezugspunkt für die Berechnung der zu fahrenden Schritte. Dazu wurde der Oberarmwinkel am oberen Anschlag als Konstante hinterlegt.
Wird nun eine neue anzufahrende Koordinate vorgegeben werden folgende Schritte ausgeführt:
1. Berechnung der neuen Oberarmwinkel mit Deiner Funktion "hand_winkel".
2. Berechnung der Schritte aus den Oberarmwinkeln in der Funktion "winkel_schritte".
Dazu wird einfach der Winkel mit der Anzahl Schritte pro Grad der Schrittmotoren multipliziert. Diese ergibt sich aus der bekannten
Anzahl Schritte pro Umdrehung der Motoren (200/Umdr.), Ansteuerung in 1/16 Schritten und der Übersetzung des Getriebes (4:1).
3. Anfahrt der neuen Position über die angepassten Funktionen "ansteuern" bzw. "gehezu".
In dem angefügten Programm sind alle benutzten Methoden enthalten. Es entspricht deinem Programm "Delta_Manipulator".
Code: Alles auswählen
#include <Wire.h>
#include <ArduinoNunchuk.h>
#include <ftPwrDrive.h>
#include <Ftduino.h>
#define magnet Ftduino::M4
#define magnet_plus Ftduino::RIGHT
#define magnet_minus Ftduino::LEFT
#define magnet_aus Ftduino::OFF
ArduinoNunchuk nunchuk = ArduinoNunchuk();
ftPwrDrive Drive = ftPwrDrive(32);
static const uint8_t M_All = 0b00000111;
long schritte_soll[3];
long schritte_ist[3];
float phi_soll[3]; // Winkelwerte
float y0, z0, x1, y1, z1, x2, y2, z2; // Ellenbogen
float x_soll, y_soll, z_soll;
float x_ziel, y_ziel, z_ziel;
float x = 0.0, y = 0.0, z = 91.90; // aktuelle Pos. vorbelegt mit oberen Anschlag
const float s = 40.0; // effektive Entfernung der Schultern vom Zentrum
const float l = 75.0; // Länge der Oberarme
const float L = 195.0; // Länge der Unterarme
const float h = 217.5;
const float phi_oben = 0.5547; // rad Winkel Oberarm am oberen Anschlag
const long v_max = 3000; // max. Schritte/Sek.
// mathematische Konstanten
const float sin120 = 0.866025;
const float cos120 = -0.5;
const float sin240 =-sin120;
const float cos240 = cos120;
byte center_x, center_y;
int center_accel_y;
unsigned long letzter_zButton, startzeit, dauer;
boolean magnetisch = false;
// Setup
void setup() {
ftduino.init();
Drive.setMicrostepMode(SIXTEENTHSTEP);
nunchuk.init();
delay(10);
do {
nunchuk.update();
delay(20);
} while (nunchuk.cButton == 0);
center_x = nunchuk.analogX;
center_y = nunchuk.analogY;
center_accel_y = nunchuk.accelY;
letzter_zButton = millis();
dauer = 0;
home(false);
}
void loop() {
delay(5);
nunchuk.update();
x_ziel = 0.6*(nunchuk.analogX - center_x);
y_ziel = 0.6*(nunchuk.analogY - center_y);
z_ziel = 55.0 - 0.18*(nunchuk.accelY - center_accel_y);
ansteuern();
if (millis() > letzter_zButton + 500) {
if (nunchuk.zButton != 0) {
letzter_zButton = millis();
if (magnetisch) {
magnetisch = false;
ftduino.motor_set(magnet, magnet_minus, Ftduino::MAX);
delay(100);
ftduino.motor_set(magnet, magnet_aus, Ftduino::MAX);
}
else {
magnetisch = true;
ftduino.motor_set(magnet, magnet_plus, Ftduino::MAX);
}
}
}
}
void home(byte disable) {
Drive.setMaxSpeed(FTPWRDRIVE_M1, 500);
Drive.setMaxSpeed(FTPWRDRIVE_M2, 500);
Drive.setMaxSpeed(FTPWRDRIVE_M3, 500);
Drive.homingOffset(FTPWRDRIVE_M1, 48);
Drive.homingOffset(FTPWRDRIVE_M2, 48);
Drive.homingOffset(FTPWRDRIVE_M3, 48);
Drive.homing(FTPWRDRIVE_M1, 3000, disable);
Drive.homing(FTPWRDRIVE_M2, 3000, disable);
Drive.homing(FTPWRDRIVE_M3, 3000, disable);
while (Drive.isHoming(FTPWRDRIVE_M1) || Drive.isHoming(FTPWRDRIVE_M2) || Drive.isHoming(FTPWRDRIVE_M3))
;
Drive.setPosition(FTPWRDRIVE_M1, 0);
Drive.setPosition(FTPWRDRIVE_M2, 0);
Drive.setPosition(FTPWRDRIVE_M3, 0);
schritte_ist[0] = 0;
schritte_ist[1] = 0;
schritte_ist[2] = 0;
}
boolean ansteuern () {
float abstand, dx, dy, dz;
const float schrittweite = 3.0;
boolean aktion = true;
dx = x_ziel-x;
dy = y_ziel-y;
dz = z_ziel-z;
abstand = sqrt( dx*dx + dy*dy + dz*dz );
if (abstand > schrittweite) {
x_soll = x + schrittweite*dx/abstand;
y_soll = y + schrittweite*dy/abstand;
z_soll = z + schrittweite*dz/abstand;
}
else {
x_soll = x_ziel; y_soll = y_ziel; z_soll = z_ziel;
aktion = false;
}
hand_winkel();
winkel_schritte();
gehe_zu();
x = x_soll;
y = y_soll;
z = z_soll;
return (aktion);
}
void gehe_zu() {
byte i;
long v, diff;
float d_max;
d_max = 0;
for ( i = 0; i < 3; i++) {
diff = abs(schritte_ist[i] - schritte_soll[i]);
if (diff > d_max) d_max = diff;
}
for ( i = 0; i < 3; i++) {
if (schritte_ist[i] == schritte_soll[i]) v = v_max;
else v = abs(schritte_ist[i] - schritte_soll[i]) * ( v_max / d_max);
Drive.setMaxSpeed(FTPWRDRIVE_M[i], v);
schritte_ist[i] = schritte_soll[i];
}
Drive.setAbsDistanceAll(schritte_soll[0], schritte_soll[1], schritte_soll[2], 0);
Drive.startMovingAll(M_All, 0b00000000);
while (Drive.isMoving(FTPWRDRIVE_M1) || Drive.isMoving(FTPWRDRIVE_M2) || Drive.isMoving(FTPWRDRIVE_M3))
;
}
void winkel_schritte() {
for (byte i = 0; i < 3; i++) {
schritte_soll[i] = -(( phi_oben - phi_soll[i]) * 2037.1879); //57.296 Rad -> Grad * 35.5555 Steps/Grad bei 1/16 Steps
}
}
void hand_winkel() {
float a = x_soll*x_soll + (y_soll+s)*(y_soll+s) + (z_soll-h)*(z_soll-h) + l*l - L*L - 2*(y_soll+s)*l;
float b = 4.0*(h-z_soll)*l;
float c = a + 4.0*(y_soll+s)*l;
float t = 0.5*(-b + sqrt(b*b-4.0*a*c))/a;
phi_soll[0] = 2.0*atan(t);
a = (x_soll-s*sin120)*(x_soll-s*sin120) + (y_soll+s*cos120)*(y_soll+s*cos120)
+ (z_soll-h)*(z_soll-h) + l*l - L*L - 2.0*(-x_soll*sin120+y_soll*cos120+s)*l;
c = a + 4.0*(-x_soll*sin120+y_soll*cos120+s)*l;
t = 0.5*(-b + sqrt(b*b-4.0*a*c))/a;
phi_soll[1] = 2.0*atan(t);
a = (x_soll-s*sin240)*(x_soll-s*sin240) + (y_soll+s*cos240)*(y_soll+s*cos240)
+ (z_soll-h)*(z_soll-h) + l*l - L*L - 2.0*(-x_soll*sin240+y_soll*cos240+s)*l;
c = a + 4.0*(-x_soll*sin240+y_soll*cos240+s)*l;
t = 0.5*(-b + sqrt(b*b-4.0*a*c))/a;
phi_soll[2] = 2.0*atan(t);
}
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Ich habe den Delta-Roboter aus dem Buch - in Ermangelung von 3 XS-Motoren - etwas abgewandelt und mit XM-Motoren ausgestattet.
Die Positionsmessung erfolgt über magnetische AS5600-Encoder.
Ich habe auch XM-Motoren mit Encodern ausprobiert. Die Regelung der drei Winkel erfolgt jeweils über geschachtelte PID-Regler:
Äußerer Regler: Position, Stellgröße (output) : Geschwindigkeit
Innerer Regler: Geschwindigkeit, Stellgröße (output): PWM-Wert
Die Positionsmessung erfolgt über magnetische AS5600-Encoder.
- Delta-Roboter mit XM-Motoren (noch ohne Winkel-Encoder)
- Delta1.JPG (127.3 KiB) 17158 mal betrachtet
- Aufsicht
- Delta2.JPG (150.79 KiB) 17158 mal betrachtet
- Motor-Befestigung (hier mit XM-Encodermotoren)
- Delta3.JPG (115.51 KiB) 17158 mal betrachtet
- Motor-Befestigung mit Magnet-Encoder
- Delta4.JPG (148.43 KiB) 17158 mal betrachtet
Äußerer Regler: Position, Stellgröße (output) : Geschwindigkeit
Innerer Regler: Geschwindigkeit, Stellgröße (output): PWM-Wert

Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Der AS5600-Encoder braucht doch Magneten am beweglichen Teil? Welche Magneten sind geeignet und wie baue ich die an?
I²C für Calliope, TXT 4.0 und RX Controller.
https://git.fischertechnik-cloud.com/users/i2c/projects
https://git.fischertechnik-cloud.com/users/i2c/projects
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Als Mangete, verwende ich 4mm-Zylindermagneten (fix-o-moll) , die ich in die Rastadapter 36227 stecke.
Hier mal ein paar Bilder dazu:
Hier mal ein paar Bilder dazu:
- Delta5.JPG (110.65 KiB) 17007 mal betrachtet
- Delta6.JPG (109.79 KiB) 17007 mal betrachtet
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Hallo Florian,
da bin ich ja sehr gespannt, wie gut Deine Ansteuerung funktioniert!
Die Treiber im Adafruit-Motorshield 2.0 liefern sehr gute Kurzschlussbremsen, was essentiell für die schnelle Bewegung des Deltas war und ist. Ich habe damals einige Stunden investiert, um den Delta mit anderen Boards gleichschnell hinzubekommen - leider vergeblich. Die waren allesamt „weicher“ und die Motoren liefen etwas mehr nach.
Heute Nachmittag hatte ich übrigens auf der Modellschau in Münster bei Holger Gelegenheit, das Modell aus dem Universal Ultimate zu bewegen, das in Teilen an den Delta erinnert. Die Entwickler haben sich den ganzen Aufwand gespart, alle Verbindungen verwindungssteiff auszuführen. Das merkt man am Ergebnis. Eine präzise und schnelle elektronische Steuerung des Ultimate-Modells wäre so gut wie unmöglich. Als Spielmodell ist es natürlich sehr nett.
Viel Erfolg und Freude mit dem Delta
Thomas
da bin ich ja sehr gespannt, wie gut Deine Ansteuerung funktioniert!
Die Treiber im Adafruit-Motorshield 2.0 liefern sehr gute Kurzschlussbremsen, was essentiell für die schnelle Bewegung des Deltas war und ist. Ich habe damals einige Stunden investiert, um den Delta mit anderen Boards gleichschnell hinzubekommen - leider vergeblich. Die waren allesamt „weicher“ und die Motoren liefen etwas mehr nach.
Heute Nachmittag hatte ich übrigens auf der Modellschau in Münster bei Holger Gelegenheit, das Modell aus dem Universal Ultimate zu bewegen, das in Teilen an den Delta erinnert. Die Entwickler haben sich den ganzen Aufwand gespart, alle Verbindungen verwindungssteiff auszuführen. Das merkt man am Ergebnis. Eine präzise und schnelle elektronische Steuerung des Ultimate-Modells wäre so gut wie unmöglich. Als Spielmodell ist es natürlich sehr nett.
Viel Erfolg und Freude mit dem Delta
Thomas
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Dein Modell sieht fantastisch aus!atzensepp hat geschrieben: ↑18 Jan 2026, 00:11Ich habe den Delta-Roboter aus dem Buch - in Ermangelung von 3 XS-Motoren - etwas abgewandelt und mit XM-Motoren ausgestattet.
Die Positionsmessung erfolgt über magnetische AS5600-Encoder.
Delta1.JPG
Delta2.JPG
Delta3.JPG
Delta4.JPG
Ich habe auch XM-Motoren mit Encodern ausprobiert. Die Regelung der drei Winkel erfolgt jeweils über geschachtelte PID-Regler:
Äußerer Regler: Position, Stellgröße (output) : Geschwindigkeit
Innerer Regler: Geschwindigkeit, Stellgröße (output): PWM-Wert
Ohne Fleiß kein Preis. https://www.oyostepper.de/category-22-b ... motor.html
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
Ich habe die Teile gefunden. Und du hast noch einen Kondensator angelötet. Ist die Länge vom Magnet wichtig?
Der Wert wird über I2C ausgelesen?

Der Wert wird über I2C ausgelesen?
I²C für Calliope, TXT 4.0 und RX Controller.
https://git.fischertechnik-cloud.com/users/i2c/projects
https://git.fischertechnik-cloud.com/users/i2c/projects
Re: Modelle aus Baukasten und Buch Fischertechnik-Roboter mit Arduino
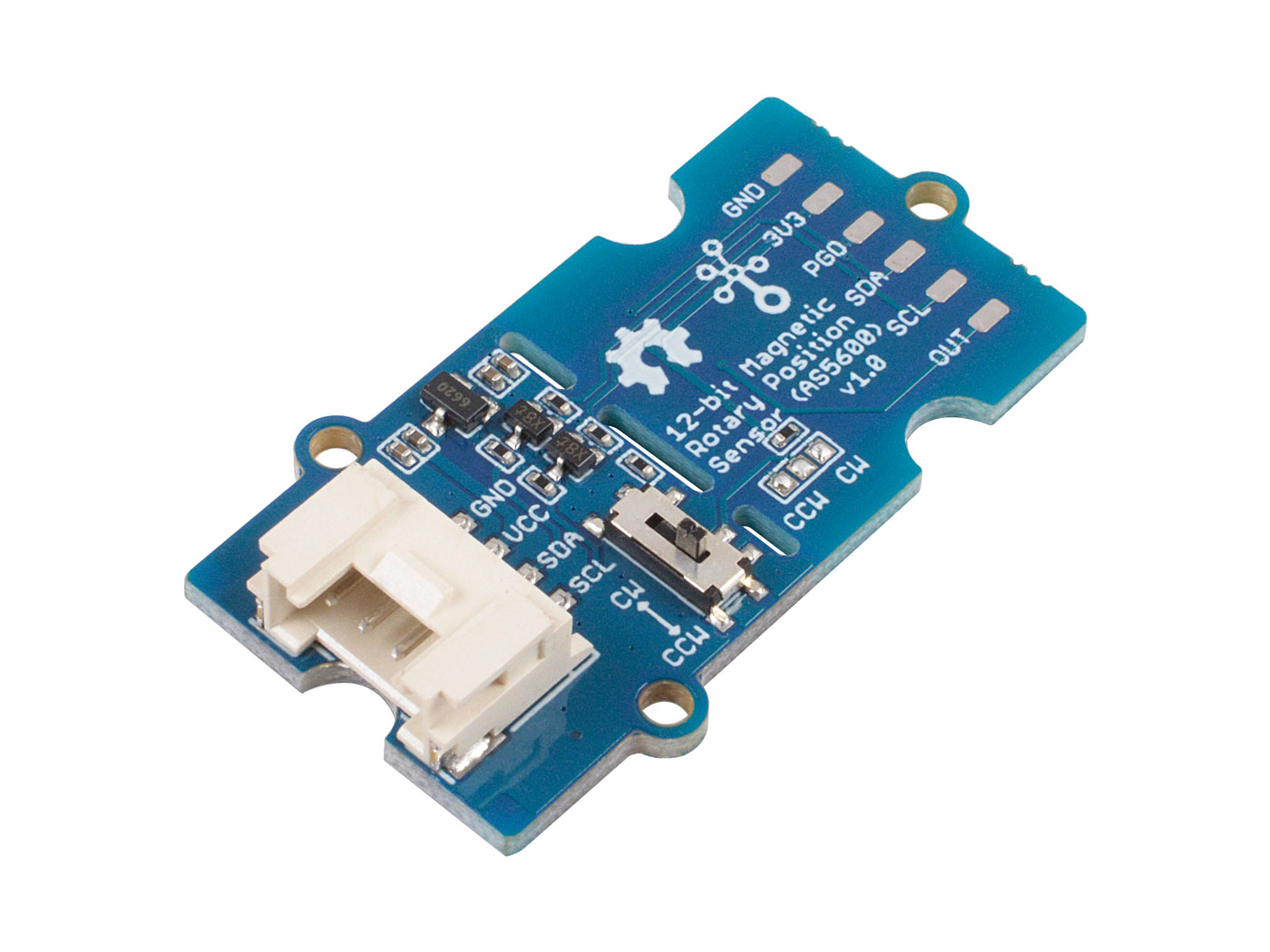
Hallo Calliope,
Magnetinduktives Winkelmess-Sensormodul AS5600 https://share.google/maIkUfCTTMTMZlI8x
und die von Dir vorgeschlagenen Magnete 4x8mm genutzt und Deine Konstruktion verwendet.
Auslesen kann man z.B. per Python über smbus. Ich habe mit diesem Code von Matthias Wandel auf Raspberry getestet:
https://github.com/Matthias-Wandel/AS56 ... -Pi-Python
Arduino script geht sicher auch, habe ich aber nicht probiert.
Entscheidend ist, dass man das "DIR"ection Pin auf high oder low verbindet, sonst kommen über I2C nur wilde Daten.
Viele Grüße
Techum
Ich habe jetzt diese besorgt
Magnetinduktives Winkelmess-Sensormodul AS5600 https://share.google/maIkUfCTTMTMZlI8x
und die von Dir vorgeschlagenen Magnete 4x8mm genutzt und Deine Konstruktion verwendet.
- IMG-20260511-WA0000.jpg (209.79 KiB) 12815 mal betrachtet
- IMG-20260511-WA0001.jpg (250.09 KiB) 12815 mal betrachtet
https://github.com/Matthias-Wandel/AS56 ... -Pi-Python
Arduino script geht sicher auch, habe ich aber nicht probiert.
Entscheidend ist, dass man das "DIR"ection Pin auf high oder low verbindet, sonst kommen über I2C nur wilde Daten.
Viele Grüße
Techum