Hallo,
während ich auf das Päckchen aus China warte, habe ich das Piher PT 15 Poti (in der Variante PT15 N H05 10kΩ) hier mal ein wenig auf den Teststand geschickt. Interessiert haben mich
1. Effektiver Winkelbereich
2. Linearität
3. Positionsgenauigkeit
4. Verschleiß
- resized_DSC_0558.JPG (127.48 KiB) 22356 mal betrachtet
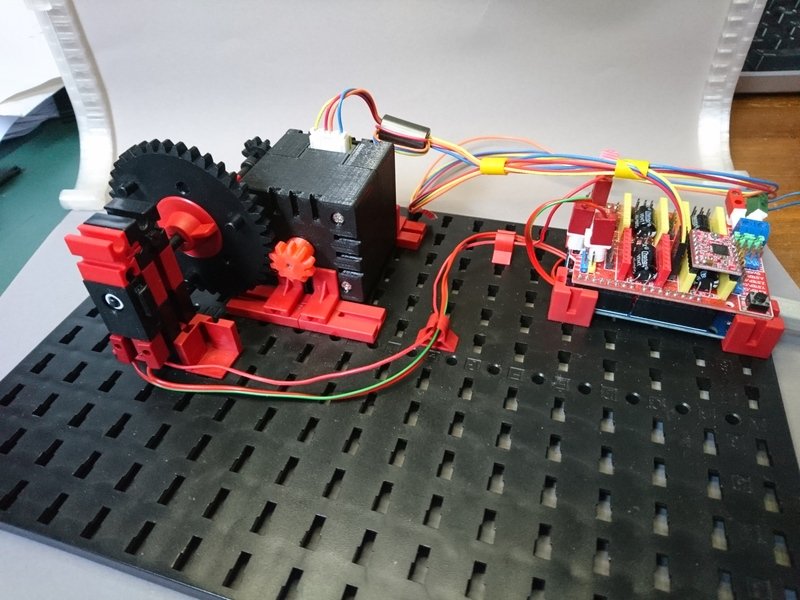
Die Messungen beruhen auf dem Vergleich von gemessenem Potentiometerwert (Abk. P, von 0 bis 1023 per Arduino analogRead()) und Steps ab Referenzposition (0 bei P=0). Das Spiel von Rastachse auf Potentiometer habe ich durch einen kleinen gedruckten Adapter eliminiert, zwischen Z10 und Z40 bleibt natürlich etwas Umkehrspiel. Bisher beruhen alle Messungen auf einem einzelnen Potentiometer, neu gekauft vor ca. 3 Jahren.
1. Effektiver Winkelbereich
Der
Stepper hat 200 Schritte pro Umdrehung, bei 1/8 Microstepping und einer Übersetzung 4:1 macht das 6400 (Micro-)Steps pro Umdrehung. Für den Bereich von P=0 bis P=1023 braucht es 4240±4 Schritte, das entspricht einem Winkelbereich von
238,5 Grad. Der im
Datenblatt angegebene "Electrical rotation angle" von 240° ± 20° wird also ziemlich genau erreicht.
2. Linearität

- resized_Messreihe actual vs expected linear.png (50.34 KiB) 22356 mal betrachtet
Abgetragen sind je zwei Messfahrten über den gesamten Messbereich von P=0 bis P=1023 vorwärts und rückwärts. Befunde:
(a)
Hohe Übereinstimmung zwischen den Fahrten. Der Versatz zwischen Vorwärts- und Rückwärtsfahrt ist mit dem Umkehrspiel zwischen Z10 und Z40 zu erklären, ansonsten praktisch deckungsgleiche Kurven, die beiden Vorwärts- und Rückwärtsfahrten überlagern sich jeweils.
(b) Geringe Abweichungen vom erwarteten linearen Verlauf. Die Auflösung ist also über den Messbereich hinweg
nicht homogen. Für exakte Winkelmessungen/-positionierungen kann das je nach Anwendung ohne (vermutlich zu aufwändige) Korrektur zu ungenau sein. Für das Wiederanfahren gespeicherter Positionen dürfte sich daraus aber kein Problem ergeben.
(c) Größere Ungenauigkeiten in Nähe der
Endpunkte. Die jeweils 10 (konservativ: 20) äußeren P-werte sollten nicht genutzt werden. Pragmatisch könnte der
Bereich von P=12 bis P=1011 genutzt werden, dann hätte man eine Auflösung von exakt 1000 P-Werten und wäre relativ sicher ggü. Ungenauigkeiten in den Extrembereichen.
3. Positionsgenauigkeit
Die Testroutine lässt
i zufällig bestimmte Zielwerte (in Schritten) in einem spezifizierten Winkelbereich
j mal anfahren und bestimmt jeweils die akkumulierten relativen Fehler
er (mit Vorzeichen) und absoluten Fehler (ohne Vorzeichen)
ea. Die folgenden Befunde beruhen auf wiederholte Tests mit i=10 und j=10 in variierenden Winkelbereich von ca. 48 Grad (20% des möglichen Bereichs). Eine typischer Testlauf:
Code: Alles auswählen
RESULTS with targets = 10 and test runs per target = 10
#0 target: 3395 pot val: 822 error: 4 absolute error: 4
#1 target: 3437 pot val: 823 error: 13 absolute error: 13
#2 target: 3861 pot val: 917 error: 5 absolute error: 5
#3 target: 3846 pot val: 916 error: -5 absolute error: 5
#4 target: 3518 pot val: 851 error: 2 absolute error: 2
#5 target: 3460 pot val: 838 error: 4 absolute error: 4
#6 target: 3732 pot val: 883 error: 2 absolute error: 2
#7 target: 3866 pot val: 918 error: 1 absolute error: 1
#8 target: 3711 pot val: 901 error: 11 absolute error: 11
#9 target: 3497 pot val: 847 error: -2 absolute error: 2
Sum error: 35 Avg error: 0.35
Sum absolute error: 49 Avg absolute error: 0.49
Befunde:
(a) Die Fehler unterscheiden sich von Zielwert zu Zielwert teils deutlich. Solange sie aber unter oder nahe bei der Anzahl der Testanfahrten (runs per target) liegen, sollte das im erwartbaren Bereich sein, da an der Grenze zwischen zwei benachbarten Messwerten immer Unschärfe (jitter) besteht.
(b)
er und
ea sind nicht identisch, aber nah beieinander. Bei völlig zufällig verteilten Fehlern sollte
er gegen Null tendieren, da sich over- und under-shooting aufheben müssten. Mir ist nicht klar, warum die Fehler sich asymmetrisch verteilen, da Zielwerte von beiden Seiten angefahren werden.
(c) Ein mittlerer absoluter Fehler von
ea < 1 erscheint mir
hervorragend. Die theoretische Auflösung von ca. 1/4° (240°/1024 bei einem 10bit ADC) wird natürlich nicht erreicht, aber
1/2° bis 1° scheinen realistisch erwartbar, natürlich unter Berücksichtigung der nicht 100%igen Linearität (s. 2.).
4. Verschleiß
Das Datenblatt des PT-15 gibt für die Standardmodelle eine Lebensdauer von 1000 Zyklen an. Für einen Stresstests habe ich die Testfahrten nach obigem Schema auf 10% des möglichen Winkelbereich beschränkt. Nach > 3000 Fahrten konnte ich noch keine Abnahme der Genauigkeit feststellen können, der absolute Fehler schwankt zwar, bleibt aber insgesamt stabil. Die
Lebensdauer gemäß Datenblatt ist also mehr als deutlich gegeben, für Modelle, die
nicht im Dauereinsatz laufen sollen, scheint mir das Modell trotz der geringen Kosten geeignet.
Interessant übrigens an dieser Stelle, dass es lt. Datenblatt Varianten den PT 15 mit "Extra long life: 100K cycles" gibt, die zusätzlich ein geringeres Drehmoment aufweisen. Wenn da jemand eine
Bezugsquelle auftun würde, wäre das natürlich genial, nicht zuletzt auch wegen des bei diesen Modellen wohl geringeren Drehmoments. Denn diesen Nachteil der Trimmer muss man erwähnen: Sie drehen nicht gerade leichtgängig, für
schwache Motorleistungen scheinen sie mir nicht geeignet.
lg
Jan
PS: Gehäuse demnächst auf thingiverse