Hallo,
beim ersten Modell Greifarmroboter des Baukastens stört es mich, dass der Greifer über eine vorgegebene Anzahl Impulse soweit geschlossen wird, dass er das zu befördernde Teil greift. Sind zuviele Impulse angegeben, bleibt das Programm hängen, weil keine Impulse mehr kommen, wenn das Teil gefasst ist und der Greifer nicht weiter schließen kann. Wenn ich zu wenig Impulse angebe, wird das Teil nicht gegriffen. Auch ist es nicht möglich, Teile verschiedener Größe zu greifen. Deswegen habe ich mir Gedanken gemacht und überlegt, wie man das flexibler gestalten könnte und bin darauf gekommen, dass ich den Greifer so lange schließen lasse, bis keine Impulse mehr kommen. Das bedeutet dann nämlich, dass der Greifer geschlossen ist und der Motor deswegen nicht weiterdrehen kann.
Bisher habe ich nur keine Möglichkeit gefunden, wie ich in meinem Programm geschickt feststellen kann, dass keine Impulse mehr kommen und ich deswegen den Motor stoppen muss und dann mit dem Rest des Programms weitermachen kann.
Meine Idee war, alle 0,2 Sekunden nachzugucken, ob es seit der letzten Prüfung einen Zähl-Impuls gegeben hat. War das der Fall, wird nach 0,2 Sekunden wieder geprüft, ansonsten wird der Motor gestoppt.
Hat jemand eine Idee, wie das in der RoboPro Software abgebildet werden könnte? Es gibt ja die Elemente, die auf einen Impuls warten, aber keins, das überprüft, ob es einen Impuls gab und dann eine Ja/Nein-Verzweigung hat. Und es gibt auch kein Element, dem ich sagen kann, warte x Sekunden auf einen Impuls.
Automation Robots: Steuerung des Greifers
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
Re: Automation Robots: Steuerung des Greifers
Hallo,
wenn Du die Beispielprogramme für den Greifarmrob nutzt :
in PosXS einen zusätzlichen Prozeß (grünes Männchen) unterbringen, der alle x msec den Eingang Ist mit einer lokalen Variablen vergleicht, die das vorherige Ist enthält. Der Prozeß wird autom. mit dem UP gestartet und beendet.
Gruß Ulrich Müller
wenn Du die Beispielprogramme für den Greifarmrob nutzt :
in PosXS einen zusätzlichen Prozeß (grünes Männchen) unterbringen, der alle x msec den Eingang Ist mit einer lokalen Variablen vergleicht, die das vorherige Ist enthält. Der Prozeß wird autom. mit dem UP gestartet und beendet.
Gruß Ulrich Müller
Re: Automation Robots: Steuerung des Greifers
Hi,
das Beispielprogramm hab ich nicht genutzt sondern ein selbst geschriebenes. Der zusätzliche Prozess war die zündende Idee. Ich wusste nicht, dass man in einem Unterprogramm einen zyklischen anlegen kann, der beim Verlassen des Unterprogramms beendet wird. Hab's eingebaut und klappt super. Jetzt kann der Greifer Gegenstände verschiedener Größe greifen und das Programm bleibt nicht mehr hängen, nur weil der Greifer sich nicht weit genug schließen lässt.
Danke!
das Beispielprogramm hab ich nicht genutzt sondern ein selbst geschriebenes. Der zusätzliche Prozess war die zündende Idee. Ich wusste nicht, dass man in einem Unterprogramm einen zyklischen anlegen kann, der beim Verlassen des Unterprogramms beendet wird. Hab's eingebaut und klappt super. Jetzt kann der Greifer Gegenstände verschiedener Größe greifen und das Programm bleibt nicht mehr hängen, nur weil der Greifer sich nicht weit genug schließen lässt.
Danke!
-
Peterholland

- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: Automation Robots: Steuerung des Greifers
Wo im Forum oder FT-Community gab es auch noch eine Greifer-Löschung mit einer Spannung-variabele der Greifermotor ?
Ich habe schon viel gesucht,doch leider noch nichts gefunden.
Grüss,
Peter
Poederoyen NL
Ich habe schon viel gesucht,doch leider noch nichts gefunden.
Grüss,
Peter
Poederoyen NL
Peter Poederoyen NL
-
Peterholland
- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: Automation Robots: Steuerung des Greifers
Wäre es möglich das RoboPro-Programm zu mailen oder uploaden?
Ich bin interessiert in beider Löschungen: der Greifer kann Gegenstände verschiedener Größe greifen und das Programm bleibt nicht mehr hängen, nur weil der Greifer sich nicht weit genug schließen lässt.
grüss,
Peter
Poederoyen NL
Ich bin interessiert in beider Löschungen: der Greifer kann Gegenstände verschiedener Größe greifen und das Programm bleibt nicht mehr hängen, nur weil der Greifer sich nicht weit genug schließen lässt.
grüss,
Peter
Poederoyen NL
Peter Poederoyen NL

Re: Automation Robots: Steuerung des Greifers
Hallo zusammen,
ich hätte auch Interesse an diesem Programmteil.
Ich habe es auch schon selbst probiert aber irgendwie nicht hinbekommen.
Vielleicht wäre ja jemand so nett, und würde ein Bild von diesem Programmteil hier posten.
Vielen Dank und
ich hätte auch Interesse an diesem Programmteil.
Ich habe es auch schon selbst probiert aber irgendwie nicht hinbekommen.
Vielleicht wäre ja jemand so nett, und würde ein Bild von diesem Programmteil hier posten.
Vielen Dank und
Viele Grüße, Laserman
Re: Automation Robots: Steuerung des Greifers
Hallo
Theoretisch müsste das so funktionieren, ich habe es nicht getestet. Die Wartezeit muss ggf. angepasst werden.
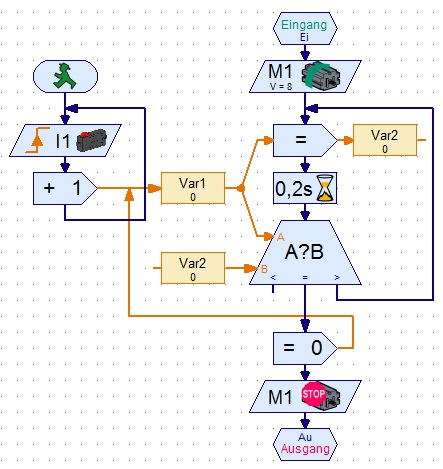
Nachdem der Greifmotor (M1) gestartet wurde, läuft die Schleife solange durch, bis keine Impulse mehr kommen, danach wird der Motor gestoppt.
Dazu wird vor einer Wartezeit die aktuelle Anzahl an zurückgelegten Impulsen (Var1) in "Var2" gespeichert.
Nach der Wartezeit wird "Var1" mit "Var2" verglichen:
Sind sie gleich, ist während der Wartezeit kein weiterer Impuls gekommen, der Motor wird gestoppt.
Ist "Var1" größer, so ist ein Impuls in der Wartezeit angekommen, die Schleife wird wiederholt.
WERNER
laserman hat geschrieben:Vielleicht wäre ja jemand so nett, und würde ein Bild von diesem Programmteil hier posten.
Theoretisch müsste das so funktionieren, ich habe es nicht getestet. Die Wartezeit muss ggf. angepasst werden.
Nachdem der Greifmotor (M1) gestartet wurde, läuft die Schleife solange durch, bis keine Impulse mehr kommen, danach wird der Motor gestoppt.
Dazu wird vor einer Wartezeit die aktuelle Anzahl an zurückgelegten Impulsen (Var1) in "Var2" gespeichert.
Nach der Wartezeit wird "Var1" mit "Var2" verglichen:
Sind sie gleich, ist während der Wartezeit kein weiterer Impuls gekommen, der Motor wird gestoppt.
Ist "Var1" größer, so ist ein Impuls in der Wartezeit angekommen, die Schleife wird wiederholt.
WERNER
Zuletzt geändert von werner am 11 Aug 2012, 11:28, insgesamt 1-mal geändert.
Wer Rechtschreibfehler findet darf sie behalten ;)
YouTube: http://www.youtube.com/ftcwerner
YouTube: http://www.youtube.com/ftcwerner

Re: Automation Robots: Steuerung des Greifers
Hallo,
man kann die auch Motorspannung abfragen, dann ist man nicht mehr an feste Impulse gebunden.
Ist hilfreich bei unterschiedlich großen Objekten.
Die Spannungsversorgung sollte stabilisiert sein.
Gruss Thomas
-----> Beispiel:
http://www.kinder-technik.de/fischertechnik/tipps.html
man kann die auch Motorspannung abfragen, dann ist man nicht mehr an feste Impulse gebunden.
Ist hilfreich bei unterschiedlich großen Objekten.
Die Spannungsversorgung sollte stabilisiert sein.
Gruss Thomas
-----> Beispiel:
http://www.kinder-technik.de/fischertechnik/tipps.html

Re: Automation Robots: Steuerung des Greifers
@mausipapa,
Are you going to upload the rpp for the gripper?
Wirst du die RPP für den Greifer hochladen?
Grub
Marspau
Are you going to upload the rpp for the gripper?
Wirst du die RPP für den Greifer hochladen?
Grub
Marspau
-
Peterholland
- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: Automation Robots: Steuerung des Greifers
Hallo Thomas,
A1 = Motorspannung......
Wird A1 direkt an O1 oder O2 angeslossen ?
Grüss,
Peter
Poederoyen NL
A1 = Motorspannung......
Wird A1 direkt an O1 oder O2 angeslossen ?
Grüss,
Peter
Poederoyen NL
Peter Poederoyen NL
Re: Automation Robots: Steuerung des Greifers
Hallo,
das nächste Mal dokumentiere ich besser. Es müßte O2 gewesen sein.
Besser wäre es natürlich über einen niederohmigen Widerstand den Motorstrom zu messen, aber die Lösung mit dem Spannungsabfall funktioniert recht gut.
Gruß Thomas
das nächste Mal dokumentiere ich besser. Es müßte O2 gewesen sein.
Besser wäre es natürlich über einen niederohmigen Widerstand den Motorstrom zu messen, aber die Lösung mit dem Spannungsabfall funktioniert recht gut.
Gruß Thomas
-
Peterholland
- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: Automation Robots: Steuerung des Greifers
Mit ein pneumatik Zylinder ist eine automatische Schließvorgang einfach möglich.
Noch besser ist ein adaptive Greifer wie einer Fischschwanzflosse funktioniert .
Zwei flexible Bänder laufen wie ein Dreieck in der Spitze zusammen.
Zwischenstege in regelmässigen Abständen sind über Gelenke mit den Bändern verbunden.
Durch diesen flexiblen, aber festen Verbund passen sich die Greiffinger der Kontur eines Werkstücks an.
Schau mal unter :
http://www.ftcommunity.de/details.php?i ... 37295#col3
und
http://www.ftcommunity.de/details.php?i ... 35355#col3
Gruss,
Peter
Poederoyen NL
Noch besser ist ein adaptive Greifer wie einer Fischschwanzflosse funktioniert .
Zwei flexible Bänder laufen wie ein Dreieck in der Spitze zusammen.
Zwischenstege in regelmässigen Abständen sind über Gelenke mit den Bändern verbunden.
Durch diesen flexiblen, aber festen Verbund passen sich die Greiffinger der Kontur eines Werkstücks an.
Schau mal unter :
http://www.ftcommunity.de/details.php?i ... 37295#col3
und
http://www.ftcommunity.de/details.php?i ... 35355#col3
Gruss,
Peter
Poederoyen NL
Peter Poederoyen NL