I imagine that novice RoboPro users are wondering "How can I develop a subroutine like the motor simulator myself?".
Or that a teacher wonders "How can I integrate this in my teaching?".
The RoboPro siumulation mode offers many possibilities for this.
Here is an example and some tips:
Work problem-driven and with a "Systematic Problem Approach"
It starts with an idea and writing down the associated objectives:
a) I need a subroutine with a data input that can handle the 3 motor command => CW, CCW and STOP.
b) The data output must be a clock pulse (0 1 0) with a frequency related to the power levels (1..8, -1 ..- 8)
No pulses with a stop command.
c) There is a need for an easy way to slow down the frequency. This allows me to observe the behavior of the system.
The first step is to analyze the 3 basic motor commands (CW,CCW, Stop):
What is a command and which RoboPro elements are available to deal with these commands?
What is the different between a value and a command?
The next step is to setup and to run some experiments to test the behavior of these commands in practice and also execute some experiment with it.
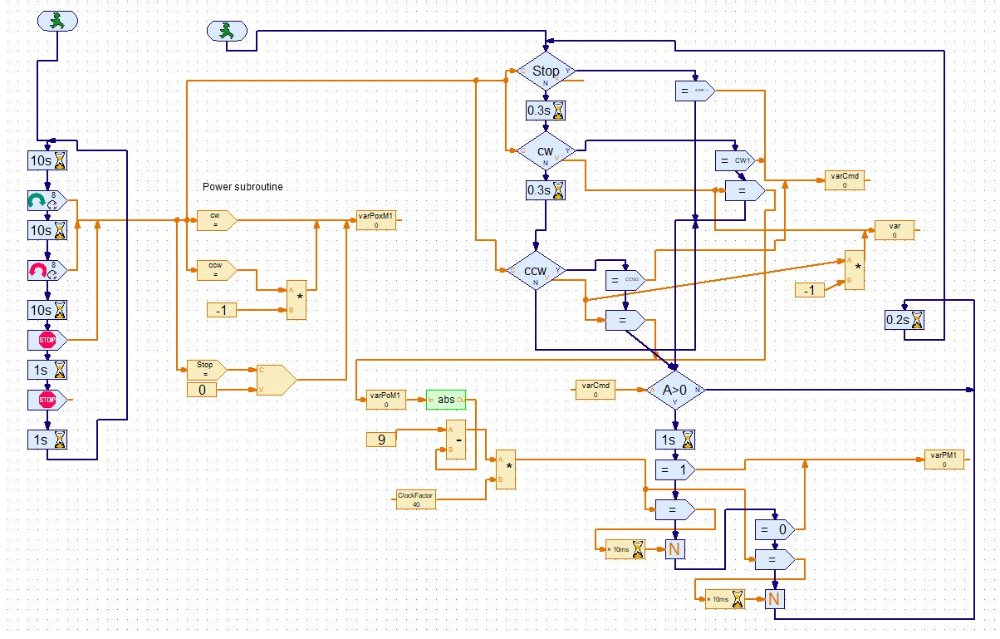
I myself have worked with the following small RoboPro program, my program to test my algorithmes.
This test program has been developed during my experiments. In the beginning it was rather small.
This simple RoboPro program runs in the simulation mode of RoboPRo, I don't need any hardware (TXT, motor, sensors).
Using this simulation mode also makes it much easier to use RoboPro in a classroom.
- impression
- MotorSimulation05.JPG (163.53 KiB) 1484 mal betrachtet
After this experimental phase follows the phase to construct a good RoboPro subroutine.
For use in education, I am also busy with expanding the
Robot Teachin application with a simulation part.
This makes this software more useful for use in educational situations. Children/students can also use this software at home to study.
===============================Google translate=======================================
Ik stel me voor dat beginnende RoboPro-gebruikers zich afvragen hoe ik zelf een subroutine zoals de motorsimulator kan ontwikkelen?
Of dat een leraar zich afvraagt "Hoe kan ik dit in mijn onderwijs opnemen?".
De RoboPro siumulatiemodus biedt hiervoor veel mogelijkheden.
Hier is een voorbeeld en enkele tips:
Probleemgestuurd werken en met een "systematische probleembenadering"
Het begint met een idee en het opschrijven van de bijbehorende doelstellingen:
a) Ik heb een subroutine nodig met een gegevensinvoer die het 3-motorige commando => CW, CCW en STOP aankan.
b) De gegevensuitvoer moet een klokpuls zijn (0 1 0) met een frequentie die gerelateerd is aan de vermogensniveaus (1..8, -1 ..- 8)
Geen pulsen met een stopcommando.
c) Er is behoefte aan een gemakkelijke manier om de frequentie te vertragen. Hiermee kan ik het gedrag van het systeem observeren.
De eerste stap is het analyseren van het motorcommando,
Wat is een commando en welke RoboPro-elementen zijn beschikbaar om met deze commando's om te gaan?
De volgende stap is het uitvoeren van enkele experimenten om het gedrag van deze opdrachten in de praktijk te testen.
En om ermee te kunnen experimenteer.
Ik heb zelf met het volgende kleine RoboPro-programma gewerkt.
Dit testprogramma is ontwikkeld tijdens mijn experimenten.
Dit eenvoudige RoboPro-programma draait in de simulatiemodus van RoboPRo, ik heb geen hardware nodig (TXT, motor, sensoren).
Het gebruik van deze simulatiemodus maakt het ook veel gemakkelijker om RoboPro in een klaslokaal te gebruiken.
Na het experimenteren volgt de stap om hiervan een goede RoboPro-subroutine te construeren.
Er is dus een expliciet onderscheid tussen de onderzoek en constructie van de oplossing.
Voor gebruik in het onderwijs ben ik oom bezig met het uitbreiden van de Robot Teachin applicatie uit met een simulatie gedeelte.
Dit maakt deze software beter bruikbaar voor educatieve toepassingen.
Kinderen/studenten kunnen deze software dan thuis voor zelfstudie gebruiken.
=====================================================================================
Ich stelle mir unerfahrene RoboPro-Benutzer vor, die sich fragen, wie ich selbst ein Unterprogramm wie den Motorsimulator entwickeln kann.
Oder dass sich ein Lehrer fragt: "Wie kann ich das in meinen Unterricht einbeziehen?".
Der RoboPro-Siumulationsmodus bietet hierfür viele Möglichkeiten.
Hier ist ein Beispiel und einige Tipps:
Arbeiten Sie problemorientiert und mit einem "systematischen Problemansatz"
Es beginnt mit einer Idee und dem Aufschreiben der damit verbundenen Ziele:
a) Ich benötige ein Unterprogramm mit einer Dateneingabe, das den 3-Motor-Befehl => CW, CCW und STOP verarbeiten kann.
b) Der Datenausgang muss ein Takt (0 1 0) mit einer Frequenz sein, die sich auf die Leistungspegel bezieht (1..8, -1 ..- 8).
Keine Impulse mit einem Stoppbefehl.
c) Es besteht ein Bedarf an einer einfachen Möglichkeit, die Frequenz zu verlangsamen. Dadurch kann ich das Verhalten des Systems beobachten.
Der erste Schritt ist die Analyse des Motorbefehls.
Was ist ein Befehl und welche RoboPro-Elemente stehen für diese Befehle zur Verfügung?
Der nächste Schritt besteht darin, einige Experimente durchzuführen, um das Verhalten dieser Befehle in der Praxis zu testen. Und experimentiere damit.
Ich selbst habe mit dem folgenden kleinen RoboPro-Programm gearbeitet.
Dieses Testprogramm wurde während meiner Experimente entwickelt.
Dieses einfache RoboPro-Programm läuft im Simulationsmodus von RoboPRo. Ich benötige keine Hardware (TXT, Motor, Sensoren).
Die Verwendung dieses Simulationsmodus erleichtert auch die Verwendung von RoboPro in einem Klassenzimmer erheblich.
Nach dem Experiment folgt der Schritt, um eine gute RoboPro-Subroutine zu erstellen.
Für den Einsatz in der Bildung erweitere ich auch die Robot Teachin-Anwendung um einen Simulationsteil.
Dies macht diese Software für die Verwendung in Bildungsprogrammen nützlicher. Kinder / Schüler können diese Software auch zu Hause zum Lernen verwenden.