Seite 1 von 1
Unterschiedliche Programmierung RoboPro
Verfasst: 18 Okt 2013, 19:03
von laserman
Hallo zusammen,
man kann ja bei RoboPro die gleiche Aufgabe auf unterschiedliche Weise programmieren:
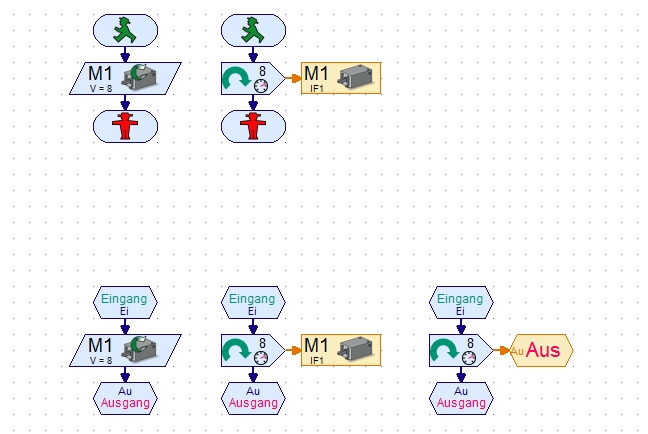
Was ist hier genau der Unterschied?
Oder merkt man den nur bei sehr großen Programmen, oder bestimmten Anforderungen?
Re: Unterschiedliche Programmierung RoboPro
Verfasst: 25 Okt 2013, 13:54
von funmca
Hallo Laserman,
bei der zweiten Variante kannst du vor allem eine größere Auflösung bei der Motorgeschwindigkeit einstellen und zum Beispiel sanfte Geschwindigkeitssteigerungen hinbekommen, 512 statt nur 8 Geschwindigkeiten,
ausserdem kannst du besser Variablen aus anderen Programmteilen oder aus Sensoren zur Motorgeschwindigkeit/Richtung heranziehen.
reicht das erstmal als Antwort?
Gruß Marco.
Re: Unterschiedliche Programmierung RoboPro
Verfasst: 27 Okt 2013, 16:28
von vleeuwen
The top two are single tasks.
The bottom three are subroutines.
The most left configurations are part of RoboPro level 1 or 2. (range: 1..8 PWM for the outputs)
The right ones are for the more experience RoboPro users (level 3 up to 5). (range: 1..512 PWM for the M outputs)
Re: Unterschiedliche Programmierung RoboPro
Verfasst: 27 Okt 2013, 16:35
von Quadro
Hallo!
Alle sind eigentlich gleich aber die unteren drei werden eigentlich nur fuer die Unterprogramme verwendet
 Ps:
Ps: Gucke auch bei meiner Frage (Ft-Schaukel), waere cool wenn du mir helfen koenntest!
Gruss,
Quadro