Hallo zusammen,
habe gestern eine (vielleicht einigen von Euch auch noch unbekannte) weitere Quelle für I²C-Sensoren und -Aktoren (alle mit einheitlichem Anschluss und 5V Betriebsspannung) gefunden:
http://www.exp-tech.de/advanced_search_ ... =grove+i2c
Beste Grüße,
Dirk
RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hallo Dirk,
Na sowas, da bin ich auch gerade unterwegs.
Ich liebäugel mit dem MPU-6050 (I2C Accelerometer+Gyro+DigitalMotionProcessor).
Hat schon jemand Erahrungen mit dem Teil gemacht?
Beste Grüße,
Helmut
Na sowas, da bin ich auch gerade unterwegs.
Ich liebäugel mit dem MPU-6050 (I2C Accelerometer+Gyro+DigitalMotionProcessor).
Hat schon jemand Erahrungen mit dem Teil gemacht?
Beste Grüße,
Helmut
-
Dirk Fox

- ft:pedia-Herausgeber
- Beiträge: 1833
- Registriert: 01 Nov 2010, 00:49
- Wohnort: Karlsruhe
- Kontaktdaten:
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hallo Helmut,
mit dem MPU-6050 habe ich noch nicht gearbeitet - aber beim weiteren Stöbern auf den Seiten desselben Anbieters habe ich noch eine I²C-7-Segment-Anzeige zu einem Drittel des Conrad-Preises entdeckt - die zudem Uhrzeiten vernünftig anzeigen kann:
http://www.exp-tech.de/Displays/7-Segme ... White.html
Die I²C-Dokumentation ist vorbildlich:
https://github.com/sparkfun/Serial7Segm ... l-Commands
Beste Grüße,
Dirk
mit dem MPU-6050 habe ich noch nicht gearbeitet - aber beim weiteren Stöbern auf den Seiten desselben Anbieters habe ich noch eine I²C-7-Segment-Anzeige zu einem Drittel des Conrad-Preises entdeckt - die zudem Uhrzeiten vernünftig anzeigen kann:
http://www.exp-tech.de/Displays/7-Segme ... White.html
Die I²C-Dokumentation ist vorbildlich:
https://github.com/sparkfun/Serial7Segm ... l-Commands
Beste Grüße,
Dirk
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hi Dirk,
EXP ist echt ein preiswerter Laden mit gutem Angebot und Verweisen zur Dokumentation. Die Suchfunktion könnte besser sein. Hab dort gestern eine verspätete Bescherung gemacht und das Paket ist schon auf dem Weg.
Beste Grüße,
Helmut
EXP ist echt ein preiswerter Laden mit gutem Angebot und Verweisen zur Dokumentation. Die Suchfunktion könnte besser sein. Hab dort gestern eine verspätete Bescherung gemacht und das Paket ist schon auf dem Weg.
- SRF02-Ultraschall-Entfernungssensor:
- I2C, 16 Adressen konfigurierbar
- preiswert
- Einäugig, daher für Abstände unter 16cm nicht geeignet, da der Transceiver nach dem Senden nachklingelt und nicht empfangsbereit ist.
- Aber das Interface lässt es auch zu, lediglich einen Puls zu senden oder auf ein Echo zu warten. Es müsste also mit zwei Sensoren möglich sein, auch unterhalb der 16cm zu messen.
- Naja ich hab gleich drei bestellt um einen Stereo-Sensor zu realisieren. Der mittlere sendet und die beiden äußeren messen Entfernung und den Laufzeitunterschied des Echos. Daraus müsste man die Position eines Hindernisses rekonstruieren können. Mal schauen ob die Genauigkeit reicht und das Timing hinkommt.
- Schick ist auch der SRF08-High-Performance-Ultrasonic-Ranger: Zweiäugig, ebenfalls I2C, 3-600cm, Reichweite (und damit Messrate) konfigurierbar und Aufnahme von bis zu 16 Echos => der kann durch Türen schauen wo andere nur den Türrahmen sehen. Gleicher Preis wie das ft-Teil. Leider z.Z. nicht vorrätig.
- Da ich irgendwann einmal sogar mit dem Gedanken gespielt habe, einen zweiten RoboTX zu erwerben, hab ich mir gedacht, dass die ft-Jungs den mit samt ihrer schlecht dokumentierten, streng geheimen und unflexiblen Firmware behalten können und hab mir einen mbed LPC1768 gegönnt.
- Cortex-M3 @ 96MHz, 32K User RAM (Naja, viel ist das nicht, ohne USB/CAN/Ethernet kann man weitere 32K nutzbar machen), 512K Flash, Ethernet, USB Host/Device, 2xSPI, 2xI2C, 3xUART, CAN, 6xPWM, 6xADC, GPIOs, 1xDAC
- I2C-Kommunikation zu TX funktioniert wunderbar (hab ich mal mit dem kleinen Bruder vom LPC1768, dem LPC11U24 ausprobiert)
- Sehr gute Online-Cloud-Entwicklungsumgebung. Man kann seine Projekte auch zu verschiedenen offline-Entwicklungsumgebungen exportieren. Soweit ich weiß ist die Firmware/mbed-CoreLib nicht open source (evtl. "noch nicht"), sie wird aber stetig durch die mbed-user-community erweitert. Von dem gebotenen Support und den Features kann man beim RoboTX nur träumen.
- RTOS: tasks, mutex, ... Interrupts, timer (µs)
- Serielles Logging zum PC, am Debugger arbeiten sie gerade
- Filesystem und vieles mehr z.B. Servo-lib mit der sich stinknormale Servos ansteuern lassen auch das ft-Teil (geh ich von aus). Mit diesem Teil hier könnte man sogar mit dem RoboTX 16 Servos ansteuern.
- Excellente Entwicklungsumgebung, C++ Library und Dokumentation, immer mit Beispielen => Projekterstellung ist ein Kinderspiel.
- Eine reges, fähiges, offenes und hilfsbereites Entwicklungsteam
- Sparkfun Motor Driver 1A Dual TB6612FNG
- Schnäppchen
- PWM gesteuert bis 100kHz => kein ft-200Hz-Motordröhnen
- superklein und leistungsstark 2x1.2A@max15V (wie heiß der wohl wird?)
- Hab die ft-Encoder an 3V ausprobiert: Auch da liefern sie ein wunderschönes Rechtecksignal. Mit den genauen Timern des mbed und den Interrupts sollte man nicht nur wie beim TX milli-sekündlich die Pulszahl pollen können sondern auch die Pulslänge, d.h. die Geschwindigkeit, mit jeder Flanke genau bestimmen können. Damit müsste sich ein schöner Motorregler realisieren lassen.
Hab das mal in RoboPro probiert. War schwierig. Funktioniert auch gar nicht mal so schlecht im Offline-mode. Wenn ich das irgendwann einmal dokumentiert bekomme und er mit 3.2.0 noch läuft, werde ich den Regler posten.
Beste Grüße,
Helmut
-
Peterholland

- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
TX-Controllers mit einer Wii-Nunchuk in der Presse :
Und zwar in der neuesten Ausgabe der Zeitschrift CT-Hacks
http://www.heise.de/hardware-hacks/meld ... 05365.html
....gleich mit zwei Artikeln.
Einmal wird der Kasten Elektropneumatics vorgestellt. Bei dem zweiten Artikel geht es um das Steuern des TX-Controllers mit einer Wii-Nunchuk.
Und zwar in der neuesten Ausgabe der Zeitschrift CT-Hacks
http://www.heise.de/hardware-hacks/meld ... 05365.html
....gleich mit zwei Artikeln.
Einmal wird der Kasten Elektropneumatics vorgestellt. Bei dem zweiten Artikel geht es um das Steuern des TX-Controllers mit einer Wii-Nunchuk.
Peter Poederoyen NL
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
I have an mbed too and have used it to control a TX over USB (mbed as host). We could try to make the mbed a USB device that behaves exactly as a TX (in online mode). Then we could enjoy better display and anything we hook up.Da ich irgendwann einmal sogar mit dem Gedanken gespielt habe, einen zweiten RoboTX zu erwerben, hab ich mir gedacht, dass die ft-Jungs den mit samt ihrer schlecht dokumentierten, streng geheimen und unflexiblen Firmware behalten können und hab mir einen mbed LPC1768 gegönnt.
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hi Ad,
I already have had a short look at your mbed repository, but I haven't found something like this. BTW your code looks quite advanced and I have to admit that my BT/USB expertise is not much more than knowing the meaning of the acronym.
Currently - if I could spare some time - I am enjoying the reactivity of this cute and well documented (since 2 weeks it's even open source) embedded realtime controller. To be honest I have never liked the TX online mode very much and I have used it only sometimes for "debugging".
Unfortunately I couldn't spare that much time so far to get into touch with my new mbed. But a few things are already running.
BTW: In your Wiki page I found the following statement:
Do you have any idea how to get in touch with those subversive elements that have dared to make text copies of the old forum.
Cheers,
Helmut
This sounds really cool. Does this mean that you have implemented something like the ftMscLib for the mbed enabling it to control the TX via the TransferArea interface. Something like this would be really great and I would gladly contribute to it.Ad2 hat geschrieben:I have an mbed too and have used it to control a TX over USB (mbed as host).
I already have had a short look at your mbed repository, but I haven't found something like this. BTW your code looks quite advanced and I have to admit that my BT/USB expertise is not much more than knowing the meaning of the acronym.
What are your application ideas for this interface? Are you planning to control the mbed online via RoboPro?Ad2 hat geschrieben: We could try to make the mbed a USB device that behaves exactly as a TX (in online mode). Then we could enjoy better display and anything we hook up.
Currently - if I could spare some time - I am enjoying the reactivity of this cute and well documented (since 2 weeks it's even open source) embedded realtime controller. To be honest I have never liked the TX online mode very much and I have used it only sometimes for "debugging".
Unfortunately I couldn't spare that much time so far to get into touch with my new mbed. But a few things are already running.
- I have managed to get the MPU-6050 Acc/Gyro working, with an already existing mbed library (ported from an Arduino project). First thing I had to do, was to calibrate the accelerometer, because of massive offsets. The factory calibration (according registers were not empty) is completely wrong. But at least the selftest results look ok, not good but within limits. The gyro seems to be ok.
- The TB6612FNG motor diver is running. Incredible, this tiny thing (~5x7mm²)does not even get warm, when driving two ft encoder motors. Wrote my own mbed lib, because I didn't like the existing ones.
- The SRF02 ultra sonic rangers are also running and a simple interface lib is in place but not published yet (The existing mbed libs don't support independent receive and send actions). But I am afraid that my "great" idea, the stereoscopic ranging and direction reconstruction, does not really work. But at least I have refreshed my triangle geometric capabilities. One problem is that the SRF02's beam pattern is quite narrow compared to other sensors. The other problem is that in my current algorithm the idealization of a point like obstacle is not appropriate. So far it can distinguish left and right but the calculated angles are complete nonsense. Needs some further investigation.
- today I will try to get the encoders running with the mbed
BTW: In your Wiki page I found the following statement:
Someone (I forgot his name) has analysed the new IR protocol and published it on the FT forum. Unfortunately FT deemed it necessary to remove this post. Luckily some people saved the text and I used it to implement receiver software for the RI.
Do you have any idea how to get in touch with those subversive elements that have dared to make text copies of the old forum.
Cheers,
Helmut
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hi Hamlet,
you have a PN. I don't have an mbed implementation, only RI (receive, see wiki) and AVR (receive, TX bridge), (send, ATTiny45, also RC5).
Ad
Maybe I didn't publish it, I did it almost two years ago when I was participating in the mbed challenge, I forgot the status but I published what I had just now so please have a look.hamlet hat geschrieben: Does this mean that you have implemented something like the ftMscLib for the mbed enabling it to control the TX via the TransferArea interface. Something like this would be really great and I would gladly contribute to it.
I already have had a short look at your mbed repository, but I haven't found something like this.
No plans really, it is more like a challenge, not to be bound to the limitations of a TX.hamlet hat geschrieben:What are your application ideas for this interface? Are you planning to control the mbed online via RoboPro?
Someone (I forgot his name) has analysed the new IR protocol and published it on the FT forum. Unfortunately FT deemed it necessary to remove this post. Luckily some people saved the text and I used it to implement receiver software for the RI.
you have a PN. I don't have an mbed implementation, only RI (receive, see wiki) and AVR (receive, TX bridge), (send, ATTiny45, also RC5).
Ad
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: RoboPro I2C-Treiber Sammlung (Touch Sensor - MPR121)
liebe FT-ler,
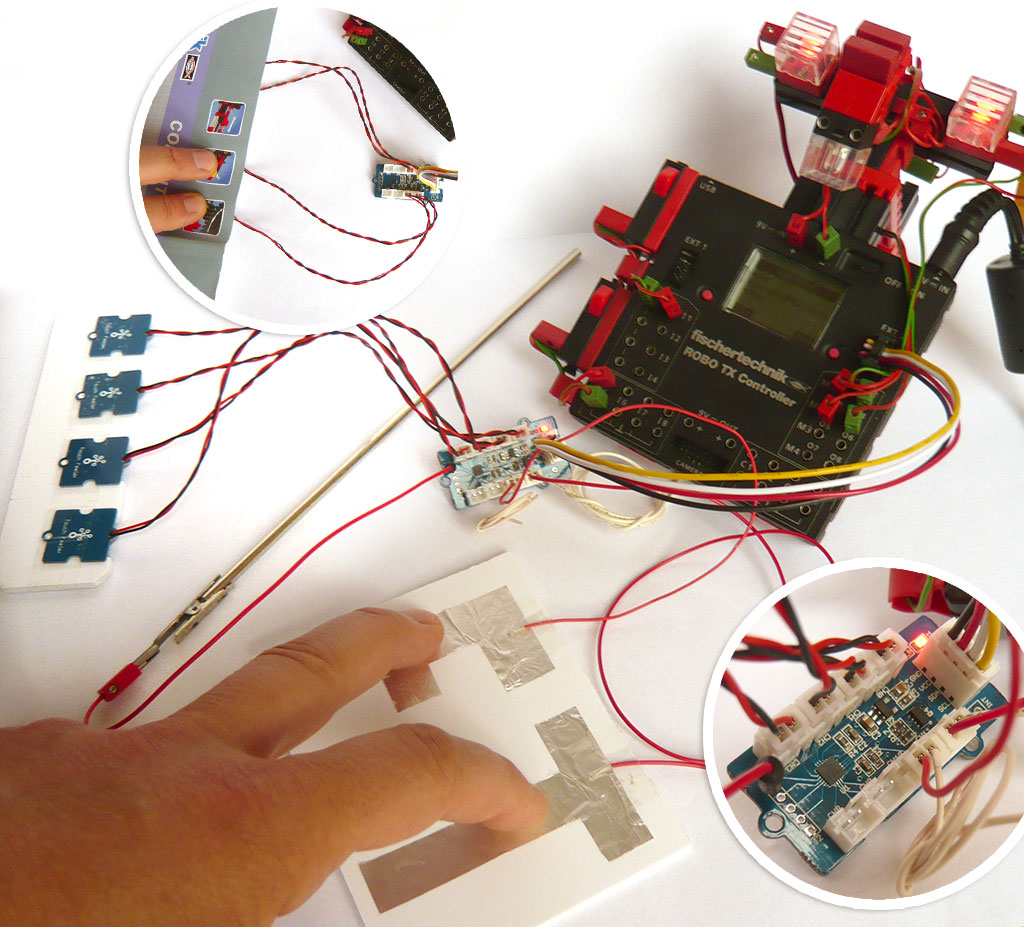
da Weihnachten vor der Tür steht habe ich für meinen Sohn mal wieder was für den I2C-Bus vorbereitet:
das Grove I2C Touch-Sensor Board zum Ansteuern von bis zu 12 kapazitativen Touch Sensoren.
http://www.seeedstudio.com/wiki/Grove_- ... uch_Sensor
Die Basis bildet der Controller MPR121. Im Gegensatz zu dem Sensor-Board von Sparkfun https://www.sparkfun.com/products/9695 kann man das Grove-Board aber direkt mit 5V betreiben. Im Lieferumfang sind 4 Touch Feeler, die man bisher jedoch nicht einzeln nachkaufen kann. Allerdings lassen sich eigene, individuelle "Sensoren" sehr leicht herstellen und entweder an den 4 verbliebenen Steckkontakten anstecken oder in einen von 4 Kontaktlöchern einlöten.
Die zugehörige Treiberdatei (eine mit und eine ohne Filtereinstellungen zum ausprobieren) werde ich in der FT-Community unter "Downloads/RoboPro" bereitstellen - oder direkt hier:
http://ftcommunity.de/data/downloads/ro ... r_v1.0.zip
Falls jemand Verbesserungsvorschläge hat bitte mich benachrichtigen - DANKE!
da Weihnachten vor der Tür steht habe ich für meinen Sohn mal wieder was für den I2C-Bus vorbereitet:
das Grove I2C Touch-Sensor Board zum Ansteuern von bis zu 12 kapazitativen Touch Sensoren.
http://www.seeedstudio.com/wiki/Grove_- ... uch_Sensor
Die Basis bildet der Controller MPR121. Im Gegensatz zu dem Sensor-Board von Sparkfun https://www.sparkfun.com/products/9695 kann man das Grove-Board aber direkt mit 5V betreiben. Im Lieferumfang sind 4 Touch Feeler, die man bisher jedoch nicht einzeln nachkaufen kann. Allerdings lassen sich eigene, individuelle "Sensoren" sehr leicht herstellen und entweder an den 4 verbliebenen Steckkontakten anstecken oder in einen von 4 Kontaktlöchern einlöten.

Die zugehörige Treiberdatei (eine mit und eine ohne Filtereinstellungen zum ausprobieren) werde ich in der FT-Community unter "Downloads/RoboPro" bereitstellen - oder direkt hier:
http://ftcommunity.de/data/downloads/ro ... r_v1.0.zip
Falls jemand Verbesserungsvorschläge hat bitte mich benachrichtigen - DANKE!
Zuletzt geändert von fantogerch am 10 Dez 2013, 19:59, insgesamt 1-mal geändert.
+grussvongeorg
-
Dirk Fox
- ft:pedia-Herausgeber
- Beiträge: 1833
- Registriert: 01 Nov 2010, 00:49
- Wohnort: Karlsruhe
- Kontaktdaten:
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hallo I²C-Fans,
habe prompt vergessen, diesen Thread hier zu bedienen: Unter http://forum.ftcommunity.de/viewtopic.p ... =20#p13662 habe ich vor ein paar Tagen einen neuen Treiber für eine I²C-Echtzeituhr (Real Time Clock - RTC) vorgestellt, den preisgünstigen DS1307 (I²C-Board ca. 15 Euro, Lebensdauer der beiliegenden Batterie: 7-19 Jahre ). Der Treiber (Download unter: http://www.ftcommunity.de/data/download ... 07v1.0.zip) enthält ein paar Verbesserungen des von ft mit Robo Pro ausgelieferten Treibers.
). Der Treiber (Download unter: http://www.ftcommunity.de/data/download ... 07v1.0.zip) enthält ein paar Verbesserungen des von ft mit Robo Pro ausgelieferten Treibers.
Dazu gibt es ein Beispielprogramm, das die Echtzeituhr mit der ft-Funkuhr aus ft:pedia 3/2012 stellt; da läuft jetzt nichts mehr aus dem Takt, wenn die Langwelle eine Zeitlang nicht erreichbar sein sollte.
Mehr zu RTCs und noch ein paar nette Beispielprogramme gibt es in der Weihnachts-ft:pedia
Beste Grüße,
Dirk
habe prompt vergessen, diesen Thread hier zu bedienen: Unter http://forum.ftcommunity.de/viewtopic.p ... =20#p13662 habe ich vor ein paar Tagen einen neuen Treiber für eine I²C-Echtzeituhr (Real Time Clock - RTC) vorgestellt, den preisgünstigen DS1307 (I²C-Board ca. 15 Euro, Lebensdauer der beiliegenden Batterie: 7-19 Jahre
Dazu gibt es ein Beispielprogramm, das die Echtzeituhr mit der ft-Funkuhr aus ft:pedia 3/2012 stellt; da läuft jetzt nichts mehr aus dem Takt, wenn die Langwelle eine Zeitlang nicht erreichbar sein sollte.
Mehr zu RTCs und noch ein paar nette Beispielprogramme gibt es in der Weihnachts-ft:pedia
Beste Grüße,
Dirk
-
schnaggels

- Beiträge: 389
- Registriert: 31 Okt 2010, 23:14
- Wohnort: Kelkheim
- Kontaktdaten:
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Statt dem teuren Conard LED würde ich zu dem hier raten:Dirk Fox hat geschrieben:Habe gleichzeitig begeistert mit dem Conrad-I2C-LED-Modul herumgespielt und war wahrscheinlich geblendet...
http://www.elv.de/output/controller.asp ... ail2=41340
Da sind noch 4 Taster und ein I2C Temperaturmodul dabei...
Da hier auch der SAA1064 verwendet wird sollte das direkt gehen, hab das aber noch nicht getestet...
I2C Realtim Clock habe ich hier im Forum auch schon für 15€ gesehen, das geht für die Hälfte und der basiert ebenfalls auf dem DS1307 Chip.
http://www.exp-tech.de/Shields/Seeedstu ... e-RTC.html
Welcher Chip hier verbaut ist steht leider nicht dabei, würde ich aber mal nachfragen...
http://www.elv.de/i-c-realtime-clock-i2 ... usatz.html
Gruß,
Thomas
-
Peterholland
- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Ich bin sehr interessiert weil meine Kuckucksuhr in de Niederlände wegen die grösse Entfernung zu Frankfurt schell aus dem Takt läuft.
Ich habe den preisgünstigen DS1307 (I²C-Board) schon bestellt bei Iprototype.nl :
https://iprototype.nl/products/componen ... ock-module
Gruss,
Peter
Poederoyen NL
Ich habe den preisgünstigen DS1307 (I²C-Board) schon bestellt bei Iprototype.nl :
https://iprototype.nl/products/componen ... ock-module
Gruss,
Peter
Poederoyen NL
Peter Poederoyen NL
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
hey FT-ler,
wer es in der dunklen Jahreszeit auch gern "bunt" mag hier die Links zu ebenfalls etwas günsitigeren 7-Segment-LED-Displays (können mit 3,3-5V betrieben werden):
http://www.exp-tech.de/Displays/7-Segme ... White.html
weitere Farben hier (rot, grün, blau, gelb, weiß):
http://www.exp-tech.de/advanced_search_ ... 372fd1450b
oder direkt bei Sparkfun:
https://www.sparkfun.com/search/results ... t=products
Die Ansteuerung mit RoboPro ist sehr ähnlich wie die Anzeigen mit SAA1064 und die entsprechenden Treiber müssen nur geringfügig modifiziert werden. Die Standard I²C-Adresse ist 0x71. Diese kann per Programmbefehl beliebig geändert werden und wird im EEPROM des ATMega328 gespeichert.
@Dirk:
sehr schönes Programm (DCF77 + RTC + LED-Displays) -> mit oben genannten Displays war sogar noch eine Sekunden-Anzeige im Budget ... Außerdem bieten diese Displays den Vorteil eines "Doppelpunkts" zur Trennung von Stunde und Minute. (Der Apostroph vor der 4. Stelle sei auch noch erwähnt)
Für einen Eindruck hier ein Bild:
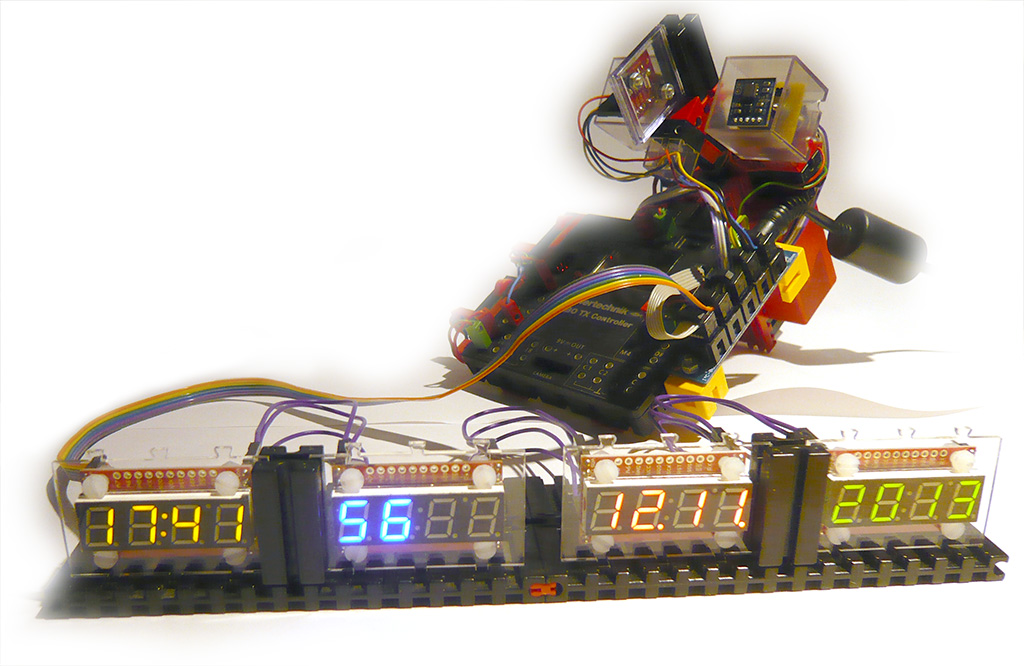
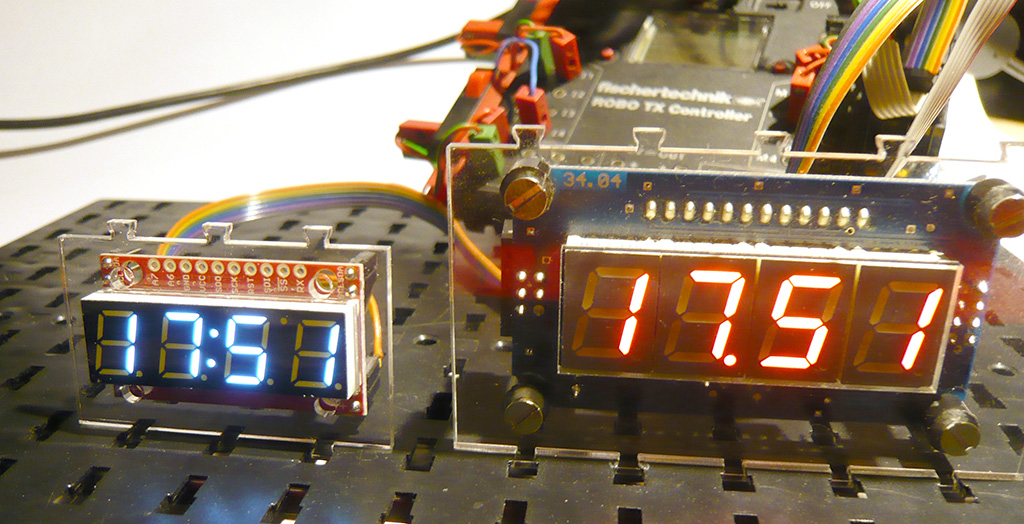
Ein weiteres zeigt den Vergleich obiger Displays mit einem von Conrad, welches deutlich größer und schwerer ist...
Infos - leider nunr englisch - zu den Displays gibt's hier:
https://github.com/sparkfun/Serial7Segm ... ifications
Die zugehörige Treiberdatei (zusätzlich ein Programm zum ändern der I²C-Adresse, sowie ein Programm zum identifiziern der I²C-Adresse falls letztere vergessen oder verstellt wurde.) werde ich in der FT-Community unter "Downloads/RoboPro" bereitstellen ...
wer es in der dunklen Jahreszeit auch gern "bunt" mag hier die Links zu ebenfalls etwas günsitigeren 7-Segment-LED-Displays (können mit 3,3-5V betrieben werden):
http://www.exp-tech.de/Displays/7-Segme ... White.html
weitere Farben hier (rot, grün, blau, gelb, weiß):
http://www.exp-tech.de/advanced_search_ ... 372fd1450b
oder direkt bei Sparkfun:
https://www.sparkfun.com/search/results ... t=products
Die Ansteuerung mit RoboPro ist sehr ähnlich wie die Anzeigen mit SAA1064 und die entsprechenden Treiber müssen nur geringfügig modifiziert werden. Die Standard I²C-Adresse ist 0x71. Diese kann per Programmbefehl beliebig geändert werden und wird im EEPROM des ATMega328 gespeichert.
@Dirk:
sehr schönes Programm (DCF77 + RTC + LED-Displays) -> mit oben genannten Displays war sogar noch eine Sekunden-Anzeige im Budget ... Außerdem bieten diese Displays den Vorteil eines "Doppelpunkts" zur Trennung von Stunde und Minute. (Der Apostroph vor der 4. Stelle sei auch noch erwähnt)
Für einen Eindruck hier ein Bild:

Ein weiteres zeigt den Vergleich obiger Displays mit einem von Conrad, welches deutlich größer und schwerer ist...

Infos - leider nunr englisch - zu den Displays gibt's hier:
https://github.com/sparkfun/Serial7Segm ... ifications
Die zugehörige Treiberdatei (zusätzlich ein Programm zum ändern der I²C-Adresse, sowie ein Programm zum identifiziern der I²C-Adresse falls letztere vergessen oder verstellt wurde.) werde ich in der FT-Community unter "Downloads/RoboPro" bereitstellen ...
+grussvongeorg
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hallo Georg,
sieht klasse aus!! Ich weiss nicht was mir besser gefällt, die Display oder die absolut edlen Plexiglashalter für´s ft System....
Gruß Rolf
sieht klasse aus!! Ich weiss nicht was mir besser gefällt, die Display oder die absolut edlen Plexiglashalter für´s ft System....
Gruß Rolf
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hallo Rolf,
die Plexiglashalter sind das erste Ergebnis der Ausflüge in ein nahegelegnenes FabLab https://fablab.fau.de/. Mein Sohn und ich sind von diesen Möglichkeiten begeistert - in diesem Fall ein Laser-Cutter. Erste 3d-Druck-Versuche haben aber noch nichts mit FT zu tun ...
Vielleicht sollte man diesbezüglich mal eine eigene Beitragsreihe eröffnen - und in der Community einen Downloadbereich mit Daten zum Nachkonstruieren.
Ich denke da wird vieles passieren ...
Grüße aus dem Süden,
die Plexiglashalter sind das erste Ergebnis der Ausflüge in ein nahegelegnenes FabLab https://fablab.fau.de/. Mein Sohn und ich sind von diesen Möglichkeiten begeistert - in diesem Fall ein Laser-Cutter. Erste 3d-Druck-Versuche haben aber noch nichts mit FT zu tun ...
Vielleicht sollte man diesbezüglich mal eine eigene Beitragsreihe eröffnen - und in der Community einen Downloadbereich mit Daten zum Nachkonstruieren.
Ich denke da wird vieles passieren ...
Grüße aus dem Süden,
+grussvongeorg
-
Dirk Fox
- ft:pedia-Herausgeber
- Beiträge: 1833
- Registriert: 01 Nov 2010, 00:49
- Wohnort: Karlsruhe
- Kontaktdaten:
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hallo Georg,
Die exp-tech-LEDs liegen schon eine Weile in meiner Schublade und harren noch des Anschlusses an meine ft-Funkuhr.
Übrigens wird es demnächst eine geben mit Tastatur und Alarmfunktion - und vielleicht sogar mit Plexiglasdispay?
Herzlicher Gruß,
Dirk
da bleibt mir doch die Spucke weg... diese ft-Plexiglas-Displays sind ja der HAMMER!fantogerch hat geschrieben:die Plexiglashalter sind das erste Ergebnis der Ausflüge in ein nahegelegnenes FabLab https://fablab.fau.de/.
Die exp-tech-LEDs liegen schon eine Weile in meiner Schublade und harren noch des Anschlusses an meine ft-Funkuhr.
Übrigens wird es demnächst eine geben mit Tastatur und Alarmfunktion
Herzlicher Gruß,
Dirk
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
...
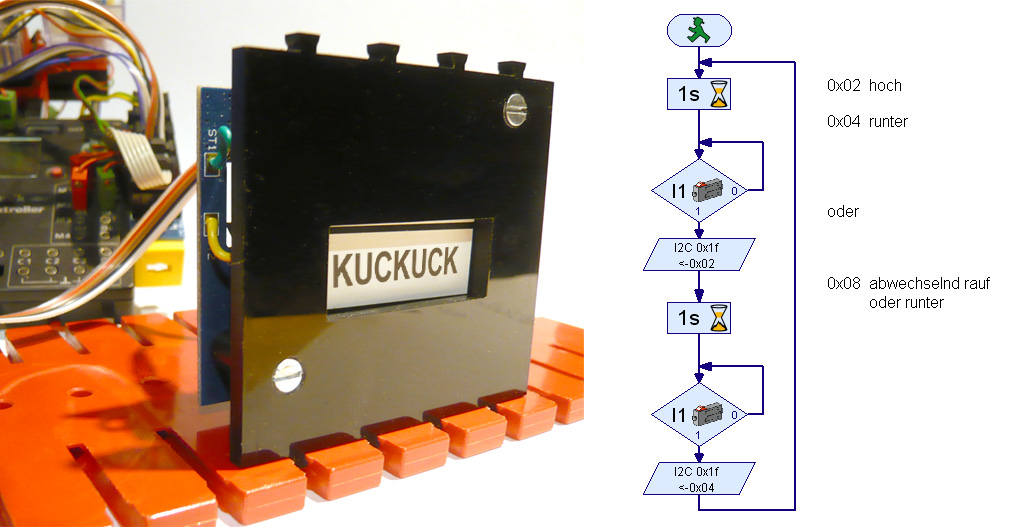
weil der Laser-Cutter schon so schön am Bruzzeln war haben wir ihn mit noch weiteren Aufgaben gefüttert, unter anderem einer Blende für die Flip-Anzeige von ELV:
http://www.elv.de/i2c-flippanzeige-komplettbausatz.html
und hier das Bild im Einsatz inklusive den einfachen RoboPro-Befehlen als Anregung für eine etwas andere Art von Kukucksuhr:
@Rolf
auch in Bremen gibt es - wie Du vielleicht schon weißt - ein FabLab:
http://www.fablabbremen.de
@Dirk
in Karlsruhe ist's ja wohl auch bald soweit ...
http://fablab-karlsruhe.org/
Falls es Bedarf an der einen oder andern Vorlage zum Laser-Cutten gibt laßt es mich wissen …
weil der Laser-Cutter schon so schön am Bruzzeln war haben wir ihn mit noch weiteren Aufgaben gefüttert, unter anderem einer Blende für die Flip-Anzeige von ELV:
http://www.elv.de/i2c-flippanzeige-komplettbausatz.html
und hier das Bild im Einsatz inklusive den einfachen RoboPro-Befehlen als Anregung für eine etwas andere Art von Kukucksuhr:

@Rolf
auch in Bremen gibt es - wie Du vielleicht schon weißt - ein FabLab:
http://www.fablabbremen.de
@Dirk
in Karlsruhe ist's ja wohl auch bald soweit ...
http://fablab-karlsruhe.org/
Falls es Bedarf an der einen oder andern Vorlage zum Laser-Cutten gibt laßt es mich wissen …
+grussvongeorg
-
Peterholland
- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Hallo Dirk,
Wäre es bitte möglich auch im RoboProgramm für die RTC-Treiber DS1307 eine Synchronisation der RTC mit DCF77-Signal nur einmal pro Stunde zu machen, wie beim I²C-Treiber-Programm für RTC DS3231 ?
Gruss,
Peter
Poederoyen NL
Wäre es bitte möglich auch im RoboProgramm für die RTC-Treiber DS1307 eine Synchronisation der RTC mit DCF77-Signal nur einmal pro Stunde zu machen, wie beim I²C-Treiber-Programm für RTC DS3231 ?
Gruss,
Peter
Poederoyen NL
Peter Poederoyen NL
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Moin Georg,
nein, FabLab höre ich zum Ersten Mal.
Macht das nicht mehr Sinn wenn einer eine Serie von den Haltern lasern lassen würde (kosten) ???
Gruß Rolf
nein, FabLab höre ich zum Ersten Mal.
Macht das nicht mehr Sinn wenn einer eine Serie von den Haltern lasern lassen würde (kosten) ???
Gruß Rolf
-
Peterholland
- Beiträge: 324
- Registriert: 01 Nov 2010, 22:28
- Wohnort: Poederoyen NL
Re: RoboPro I2C-Treiber Sammlung (I2C Driver Collection)
Die DS3231 High Precision Real-Time Clock Module - Blauw (3.3 ~ 5.5V) gibt es zum Beispiel bei :
http://www.miniinthebox.com/nl/ds3231-h ... 80551.html
Gruss,
Peter
Poederoyen NL
http://www.miniinthebox.com/nl/ds3231-h ... 80551.html
Gruss,
Peter
Poederoyen NL
Peter Poederoyen NL