Seite 1 von 1
Synchronous Distance - only one motor works
Verfasst: 18 Jan 2012, 06:43
von konjurer
My laptop computer died a few weeks ago and I didn't have my ROBO Pro programs backed up. Now I'm having trouble recreating a basic function with two motors. I'm trying to control two encoder motors via the TX Controller using the Encoder Motor control in Synchronous Distance mode. For some reason, the program only runs one motor (the other motor moves slightly for only a moment). Both motors run if I run them separately. I've reviewed the wiring and it looks fine. I have a Wait for Input control after the Encoder Motor control but it doesn't seem to stop the motor that runs after the pulses have completed. Any ideas?
Thanks!
Tim
Re: Synchronous Distance - only one motor works
Verfasst: 18 Jan 2012, 07:25
von thkais
Hi,
it would be easier to check the program if you upload it - for example to the ftcommunity download-section.
Re: Synchronous Distance - only one motor works
Verfasst: 19 Jan 2012, 07:08
von konjurer
Not sure how to post to this site so I posted the .rpp and an image of the TX/motor wiring to the English FT Forum.
http://fischertechnik.freeforums.org/sy ... s-t43.html
Thanks for all of your help!
Tim
Re: Synchronous Distance - only one motor works
Verfasst: 19 Jan 2012, 09:22
von DEAM_Ad
Hello,
the program seems to be o.k.
Are you sure, you didn't swap the two counter inputs accidentally?
So if M2 runs, the counter C3 raises. Hence M3 does not run, because the TXC believes it's far ahead of M2 (whoose Counter C2 stays at Zero - or close to it).
Therfore M2 wouldn't stop because it cant reach its distace.
Try to swap the two black wirings of C2 and C3 - perhaps it will solve the problem.
best regards
Alex
Re: Synchronous Distance - only one motor works
Verfasst: 20 Jan 2012, 06:15
von konjurer
That solved the problem. Thanks Alex!
Re: Synchronous Distance - only one motor works
Verfasst: 20 Jan 2012, 11:57
von DEAM_Ad
Hello Tim,
you're welcome!
Sometimes it is a little bit tricky to connect all the wires to the TXC correct, especially if you can't see the source of the wires in the model.
So I had accustomed myself to use the RoboPro interface-test to check the wiring of my model.
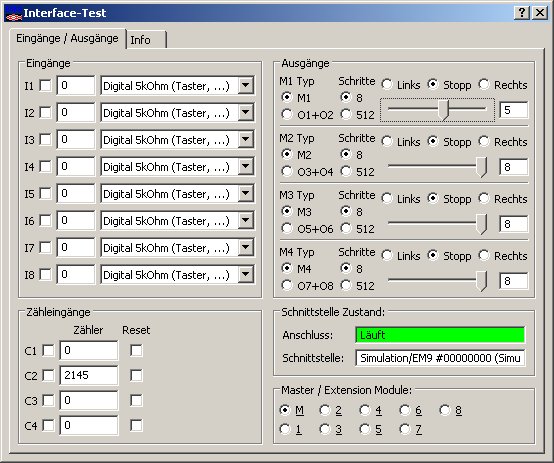
Here you can check all sensors (e.g. push-buttons, temperature sensors, counters,..) and actuators (e.g. motors or lamps) online.
You can run the motor for a test and see the responses of the sensors (like pushing a button).
So if you run a decoder motor on M2 by the interface test you can see the counter C2 rising.
best regards
Alex
p.s. thank you for quoting my answer at
http://fischertechnik.freeforums.org/. This a good way to share the knowledge at both forums

Re: Synchronous Distance - only one motor works
Verfasst: 20 Jan 2012, 16:58
von konjurer
You guys are awesome! Thanks so much for answering in English. I did take German in high school but that was many years ago and, with no one to speak German with, that knowledge vanished a long time ago.
I do have one more question on the Synchronous Distance mode. I run the encoder motors for a certain distance (D=100) and then check for input from a sensor and loop back to the Sync Distance control to run another 100 pulses. The motors do not run a second time even though you can see the program looping through the code. Here is an ASCII picture of the code:
Start
-->
/M2 M3 /
/ V=8 D=100/
-->
/1 M2E/
-->
/A<50 N \ --> loop back to top
\ Y /
--> do something else
Thanks!
Tim
Re: Synchronous Distance - only one motor works
Verfasst: 20 Jan 2012, 18:12
von DEAM_Ad
Try it this way first:
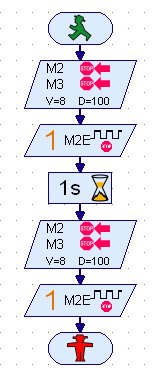
The motors have to run two times a distace of 100 with a short brake.
If this doesn't work i have no clue what's wrong.
If it works check the query of the input.
Alex
I know the mess of computer translations, especially of technical descriptions.
So I prefer to answer in english.. it takes a little bit longer, but you will get the point.
Re: Synchronous Distance - only one motor works
Verfasst: 20 Jan 2012, 19:23
von vleeuwen
Hi,
I tested your program, but now with M1/C1 and M2/C2 and a wait of 1 sec after the second motor part.
It is running without a problem.
I add a test for each motor apartly. This to see if the C1 and C2 are connected well and working.
Remark
My motors are part of a model and it is not easy to change the connections with the TX-C.