Seite 1 von 1
Omniwheels mit echtem Joystick fernsteuern
Verfasst: 13 Sep 2025, 17:58
von calliope
Was mit zwei Calliope schon länger funktioniert, jetzt auch mit zwei fischertechnik Controllern. Mit dem Joystick an der Fernbedienung fahren und lenken. Oder mit dem Touch Display in 10 Richtungen bewegen. Programmiert mit ROBO Pro Coding Blöcken und wenigen Python-Code Blöcken.
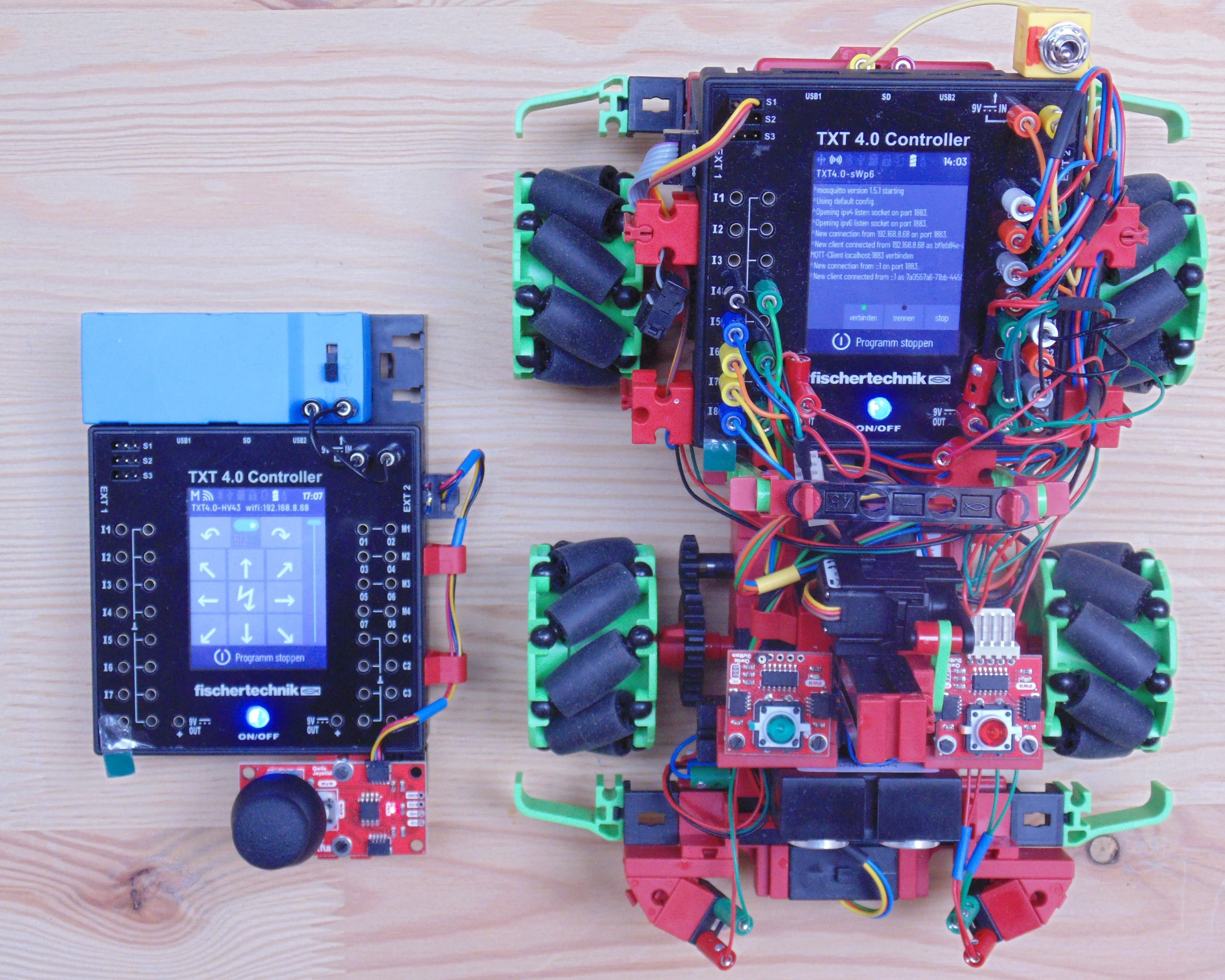
- DSC00674_4600.JPG (1.77 MiB) 13051 mal betrachtet
Re: Omniwheels mit echtem Joystick fernsteuern
Verfasst: 13 Sep 2025, 22:11
von steffalk
Tach auch!
Das Bild hättest Du mir mal 1968 prophezeien sollen... Was für eine Reise haben wir da hinter uns.
Gruß,
Stefan
Re: Omniwheels mit echtem Joystick fernsteuern
Verfasst: 14 Sep 2025, 00:29
von atzensepp
Sehr schön!
Darf man fragen, was das für Breakout-Boards unten mit den grünen und roten Elementen (beleuchtete Tasten) sind?
Grüße
Florian
Re: Omniwheels mit echtem Joystick fernsteuern
Verfasst: 14 Sep 2025, 10:17
von calliope
Das sind SparkFun Qwiic Button. Gibt es rot, grün bestückt und ohne. Da kann man Button und/oder LED selber drauf löten oder verdrahten. Aber beachten, dass I²C 3,3V hat. Nicht mit 9V verbinden, da geht der TXT 4.0 Controller kaputt!!!
https://www.sparkfun.com/products/16842
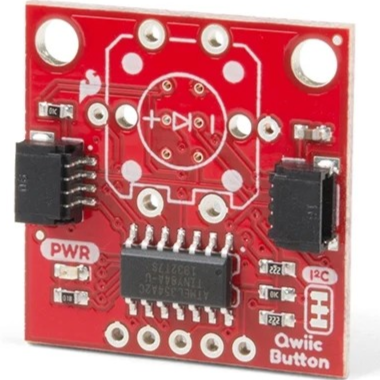
- qwiicbutton_380.png (289.18 KiB) 12923 mal betrachtet
Der eigene Prozessor speichert die letzten Tastendrücke mit Zeitstempel und für die LED Helligkeit und Blinkfrequenz. Ein Interrupt Pin kann verdrahtet werden, dann muss nicht ständig über den I²C Bus abgefragt werden (Polling). Aber auch hier 3,3V und 9V trennen!
Das Modul kostet mit LED Button und Bordcomputer weniger als ein fischertechnik Taster. Und belegt keinen Input. Und funktioniert auch am RX.
Weitere Links und die ROBO Pro Coding Blöcke sind hier beschrieben:
https://elssner.github.io/ft-Controller ... icbuttonpy
Beispiel Interrupt mit Optokoppler:
https://elssner.github.io/ft-Controller ... utton_int/
Ein anderes Beispiel ist hier:
viewtopic.php?f=8&t=9172
Für die Fernsteuerung im Bild oben werden die Buttons aber nicht benutzt.
Die Buttons werden hier verwendet, um ohne Verbindung zur App verschiedene Funktionen zu starten und wieder anzuhalten.
https://git.fischertechnik-cloud.com/i2 ... ls_Buttons
ROBO Pro Coding 6.4.3 Blöcke für TXT 4.0 und RX Controller mit zwei I²C LED Buttons: linker Knopf Hindernis ausweichen (Ultraschallsensor); rechter Knopf Spur folgen (Spursensor), 4 Omniwheels.
FG Lutz
Re: Omniwheels mit echtem Joystick fernsteuern
Verfasst: 14 Sep 2025, 19:09
von rubem
Hi / Hallo Lutz,
I'm always interested about how to use remote controls to operate ft models. Great stuff, congratulations!
------------ Google Translate
Mich interessiert immer, wie man ft-Modelle mit Fernbedienungen steuert. Tolle Sache, Glückwunsch!
Best regards / Viele Grüße,
Rubem
Re: Omniwheels mit echtem Joystick fernsteuern
Verfasst: 14 Sep 2025, 21:03
von calliope
steffalk hat geschrieben: ↑13 Sep 2025, 22:11
Das Bild hättest Du mir mal 1968 prophezeien sollen... Was für eine Reise haben wir da hinter uns.
Also ein elektrisches Raupenfahrzeug mit Schiebeschild, Vorwärts- und Rückwärtsgang und Gummimännel gab's schon 1965 zu Weihnachten.
- Weihnachten_1965.jpg (49.96 KiB) 12824 mal betrachtet
Re: Omniwheels mit echtem Joystick fernsteuern
Verfasst: 05 Okt 2025, 23:39
von Techum
calliope hat geschrieben: ↑13 Sep 2025, 17:58
...mit zwei fischertechnik Controllern. Mit dem Joystick an der Fernbedienung fahren und lenken. Oder mit dem Touch Display in 10 Richtungen bewegen. Programmiert mit ROBO Pro Coding Blöcken und wenigen Python-Code Blöcken.
Schönes Projekt mit geballter Technik.
Ich finde ja, dass es zwei Joysticks braucht, um Omniwheels ordentlich bedienen zu können (einer für Richtung und einer für Rotation) aber der vorgestellte Ansatz ließe auch das problemlos zu.
Für weniger kostenintensive Ansätze und 100% fischertechnik sei noch an die Lösung von Torsten erinnert. Mittlerweile ist ja bekannt, wie man sudo Rechte auf dem TXT 4.0 bekommt.
https://youtu.be/8gVrI1BvSR0?si=NCh3bStNKOLf3TIQ
LG
Techum
Die erste wirklich funktionierende WLAN Fernsteuerung.
Verfasst: 09 Okt 2025, 12:52
von calliope
Wozu hat Calliope den Gestensensor und die serielle Schnittstelle? Um ein Modell mit Omniwheels (Mecanum Räder) zu fahren.
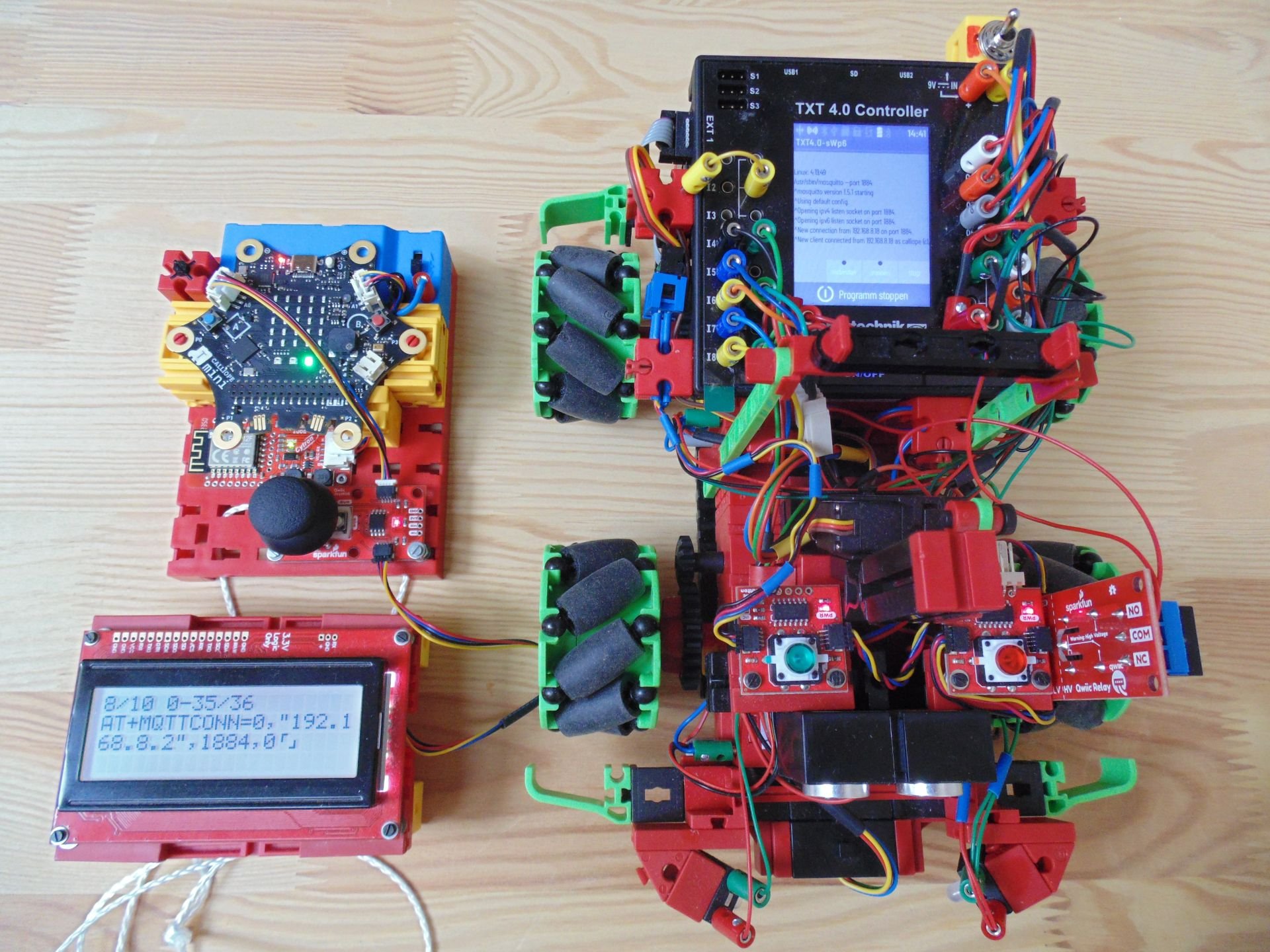
- DSC00693_1920.JPG (444.03 KiB) 11623 mal betrachtet
Das LCD Display und den Joystick am Calliope können wir weg lassen. Nur durch Neigen des Calliope fährt das Modell in 8 Richtungen (geradeaus). Mit Display nach unten dreht es auf der Stelle. Durch Drehen des Calliope sind also 10 Fahrbefehle und Stop möglich.
- pfeile.png (6.16 KiB) 11623 mal betrachtet
Ob der Joystick angeschlossen ist, wird automatisch erkannt. Damit sind dann auch Kurvenfahrten möglich. Das funktioniert nach dem Prinzip der Raupensteuerung.
Drücken auf den Joystick schaltet das I²C Relais an und das Licht.
Wenn das 20x4 LCD Display angeschlossen ist, zeigt es die AT Befehle an, die zum und vom Cytron WLAN Modul übertragen werden.
Das Modul funktioniert mit 3 Volt, aber der Strom, der aus dem Calliope kommt, reicht nicht. Es ist ein extra Spannungsregler (3,3V) unter dem Calliope versteckt. Das blaue ist ein 9V Akku.
FG Lutz