Fussballroboter, Autofabrik...
Modellideas &- presentation - Soccerrobot, Carfactory...
-
juh
- Beiträge: 907
- Registriert: 23 Jan 2012, 13:48
Beitrag
von juh » 28 Feb 2024, 20:48
Hallo zusammen,
hat schon mal jemand versucht, so etwas Ähnliches zu bauen? Ich konnte in Forum und Pool nichts finden, im Video nennt sich das "Oblique swivel joint mechanism"
 https://www.youtube.com/watch?v=fSMC4tfOqHM
https://www.youtube.com/watch?v=fSMC4tfOqHM
vg
Jan
-
atzensepp
- Beiträge: 660
- Registriert: 10 Jul 2012, 21:40
- Wohnort: Uttenreuth
Beitrag
von atzensepp » 28 Feb 2024, 21:22
Hallo Jan,
das ist ein interessantes Teil. Man bräuchte einen Drehkranz mit Innenantrieb (oblique).
Auf die Schnelle ist mir das eingefallen:
- s2.JPG (1.12 MiB) 916 mal betrachtet

- s1.JPG (1.37 MiB) 916 mal betrachtet
Leider ist der Encodermotor dafür etwas klobig. Entweder druckt man sich einen größeren Zahnkranz (
https://www.thingiverse.com/thing:551631 oder
https://www.thingiverse.com/thing:4336232) oder versucht es mit einem kleineren Motor und
Deinem kompakten Encoder.
PS. Die Farben passen in etwa

-
juh
- Beiträge: 907
- Registriert: 23 Jan 2012, 13:48
Beitrag
von juh » 28 Feb 2024, 23:47
Hallo Florian,
atzensepp hat geschrieben: ↑28 Feb 2024, 21:22
PS. Die Farben passen in etwa
Hey, dann sind wir ja fast schon am Ziel!

Ich fürchte das große Problem ist der Anbau in Achsrichtung. Ich sehe da bisher zumindest keine Möglichkeit, am Innenzahnrad so anzubauen, dass es die auftretenden Zugkräfte tragen wird. Sonst könnte man auf deinem Vorschlag natürlich aufbauen. Aber vielleicht übersehe ich was?
vg
Jan
-
atzensepp
- Beiträge: 660
- Registriert: 10 Jul 2012, 21:40
- Wohnort: Uttenreuth
Beitrag
von atzensepp » 29 Feb 2024, 09:41
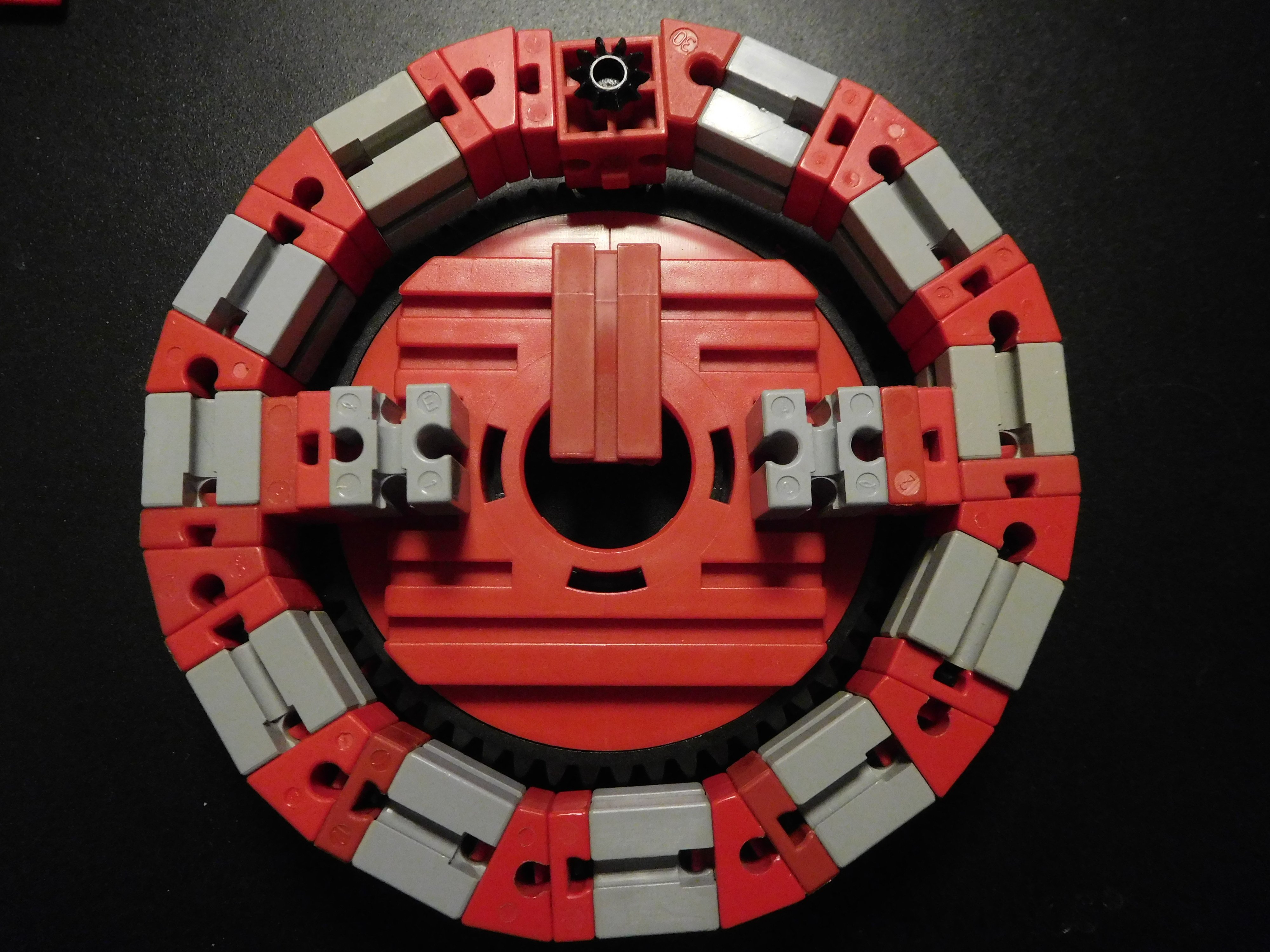
Statt am Innenzahnrad anzubauen, kann man das auch am Zahnkranz tun.
Nur mal als Idee :
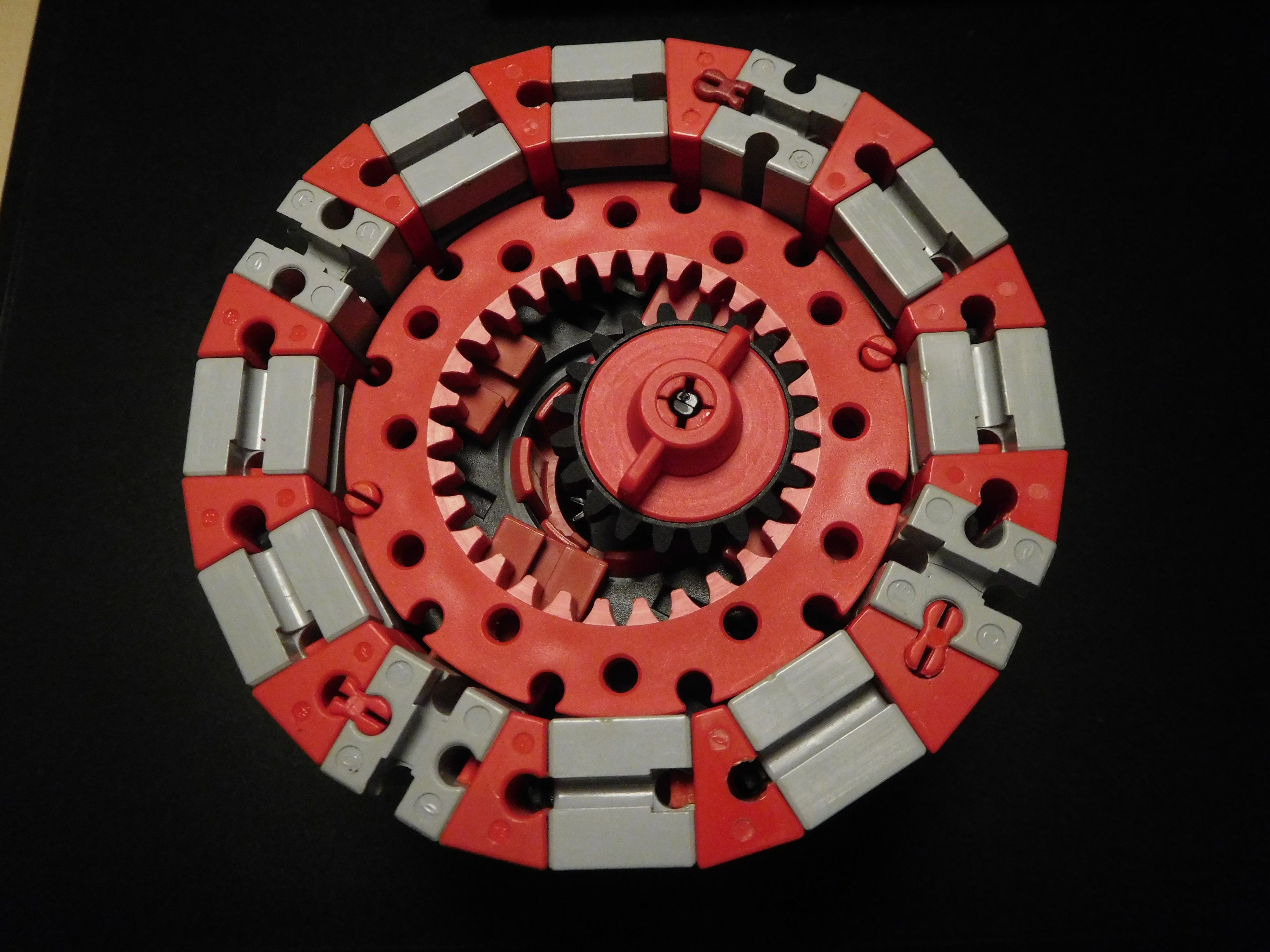
- s3.JPG (1.1 MiB) 824 mal betrachtet

- s4.JPG (1.12 MiB) 824 mal betrachtet
Wenn man Vollringe ausbildet, wird das allerdings recht schwer.
Also entweder mit Statikteilen füllen oder nur an 4 Punkten befestigen.
-
atzensepp
- Beiträge: 660
- Registriert: 10 Jul 2012, 21:40
- Wohnort: Uttenreuth
Beitrag
von atzensepp » 29 Feb 2024, 12:39
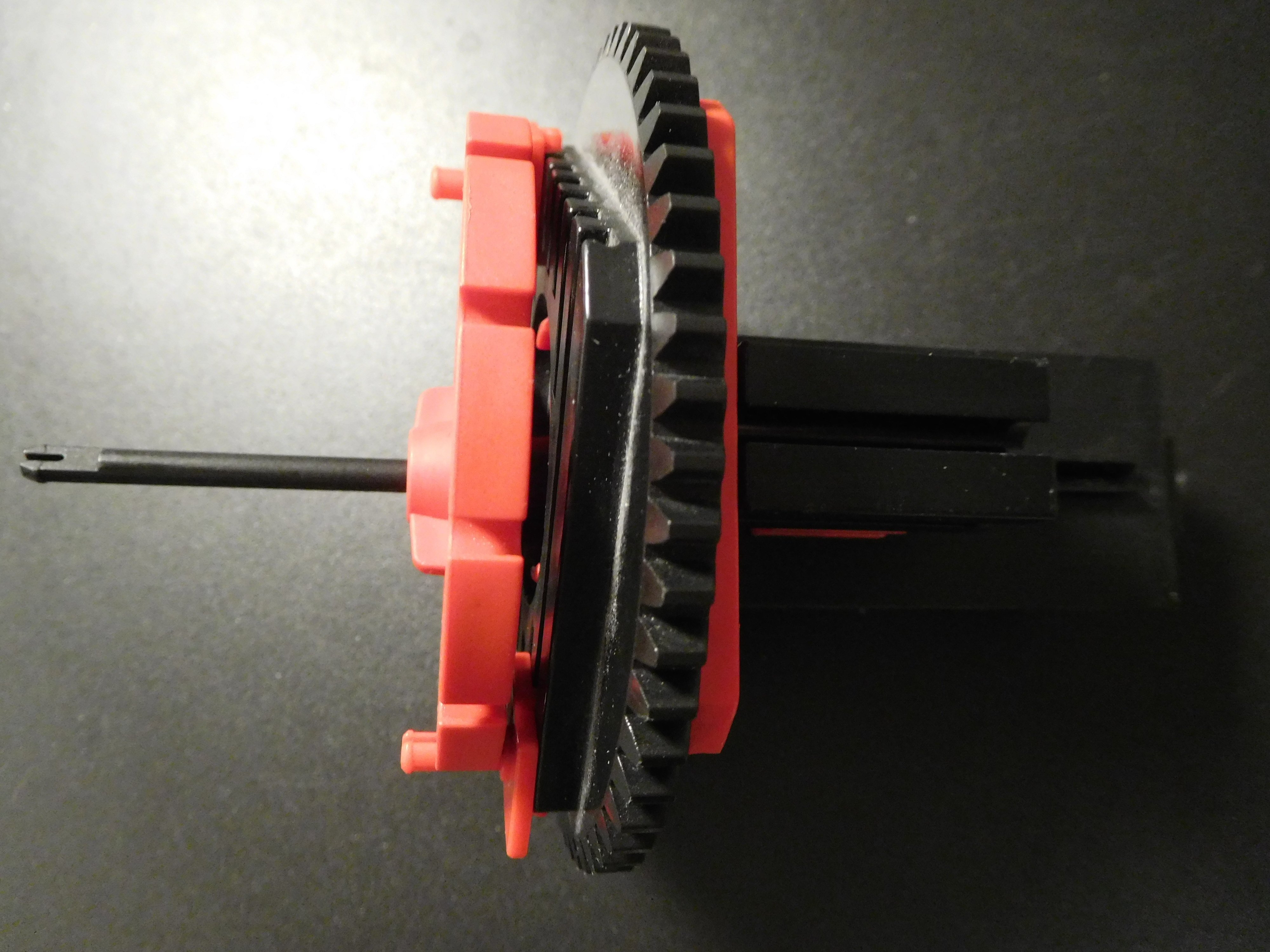
Ein andere Idee ist, den Antrieb über das Außenzahnrad des Drehkranzes zu bewerkstelligen:

- s6.JPG (1.53 MiB) 786 mal betrachtet
- s5.JPG (1.26 MiB) 786 mal betrachtet
Ob man das stabil hinbekommt ist fraglich.
Encodermotor , den man auf den roten Nutbaustein schieben kann, muss mit langsamer Drehrate gefahren werden.
-
juh
- Beiträge: 907
- Registriert: 23 Jan 2012, 13:48
Beitrag
von juh » 01 Mär 2024, 08:55
Hall Florian,
immer wieder super, wie fix du mit deinen Prototypen bei der Hand bist! Ja, das sind im Rahmen der Beschränkungen von Innenzahnrad und Drehkranz wahrscheinlich die grundsätzlichen Möglichkeiten, v.a. wenn man das "oblique" vernachlässigt. XS-Motor mit U-Getriebe und einem Rotationssensor kämen dann auch in Betracht.
Aber du erwähnst ja auch schon das Thema Stabilität, das Ganze muss ja über mindestens vier Gelenke funktionieren. Auch die Reibung der Drehscheibe lässt mich zweifeln, dass es alleine mit Originalteilen klappen kann, wenn ich überlege, welche Last da seitlich zieht, v.a. am ersten Gelenk. Bei mir sind die Drehscheiben teils schon ohne Last nicht gerade leichtgängig.
Aber im Prinzip müsste man es wohl erst mal ausprobieren. Eigentlich war meine Frage erst mal nur theoretischer Natur, ich hatte das Modell gesehen und den Eindruck, dass das mit original ft nicht wirklich hinzubekommen ist.
vg
Jan
-
fishfriend
- Beiträge: 1822
- Registriert: 26 Nov 2010, 11:45
Beitrag
von fishfriend » 08 Mär 2024, 22:25
Hallo...
Ich hab mir das Video ein paar mal angeschaut.
Ich hab dann mal angefangen das nachzubauen, bin aber letzlich auf eine andere Lösung gekommen.
Ist mehr normale ft-Bauweise geworden, also "nur" mit den Drehkränzen.
Dabei ist mir aufgefallen, das es im Video nicht ganz passend ist.
Teilweise stimmen die Winkel nicht. Die Kameraposition verschleiert das etwas. Man meint es ist gerade, ist es aber nicht.
Auch an der Wand ist es nicht bündig.
Bei ersten fischertechnik Modell, hab ich es mit 30°-60°-30° probiert.
Das führt aber nicht ganz zu den erwarteten Ergebnissen.
Dann hab ich das Modell auf 45°-90°-45°. Das scheint mir der bessere Ansatz zu sein.
Ich werde noch mal ein weiteres 90° Stück einbauen. Dann muss ich aber einen zweiten Controller einsetzen.
Mal schaun ob ich das Ganze noch schön zum "laufen" bekomme.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
