Seite 1 von 1
Mobile Robots II Neukonstruktion
Verfasst: 18 Feb 2023, 17:57
von uffi
Hallo ftcommunity,
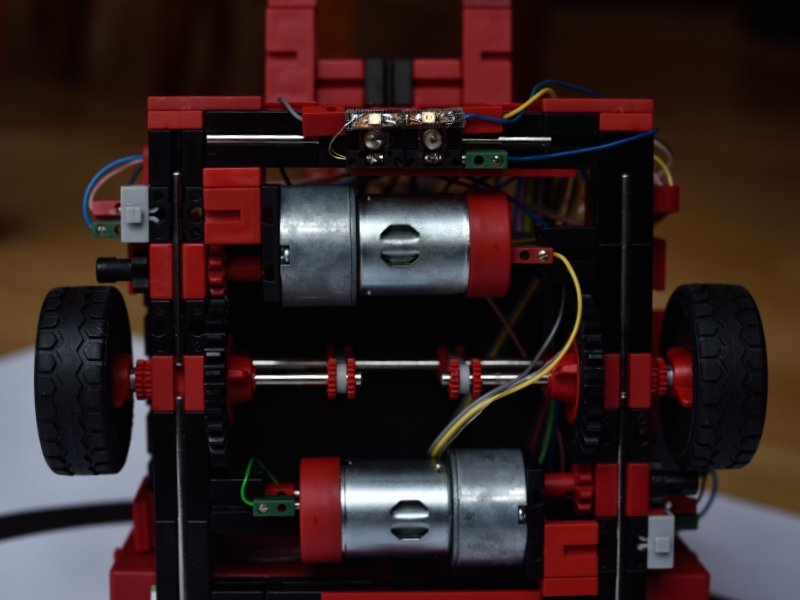
ich habe versucht, das Basismodell aus dem Baukasten Mobile Robots II (77792) aus dem Jahr 2002 neu zu konstruieren, um ein paar Schwachstellen zu beseitigen:
- verbesserte Achsaufhängung, um eine schräge Stellung der Räder unter Last zu vermeiden
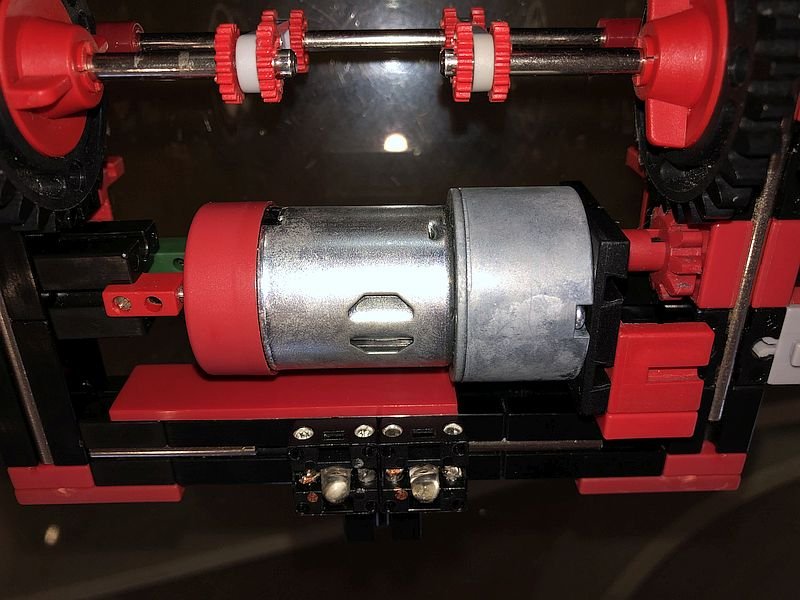
- verbesserte Aufhängung & Befestigung der Powermotoren
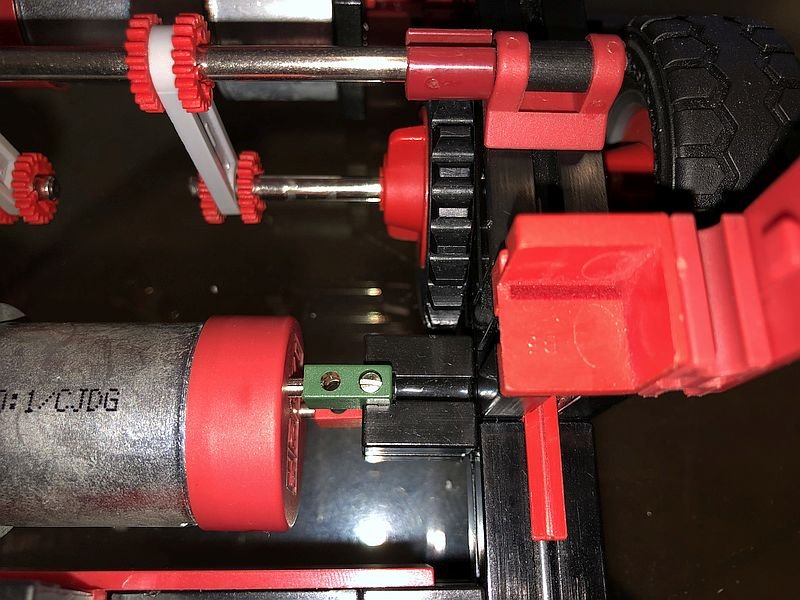
- Encoder-Schalter direkt an der Antriebsachse, um Zählfehler zu verringern
Angesteuert wird das ganze mit dem alten Universal-Interface (für der Parallelschnittstelle), welches im Gehäuse durch einen AVR Atmel Tiny26 gesteuert wird. Dadurch kann Code in C geschrieben werden, auf den AVR geladen werden und bleibt dort nach dem Ausschalten erhalten (das ging ja auf dem Intelligent Interface nicht und ich habe auch keins). siehe auch hier:
https://ftcommunity.de/bilderpool/baste ... ery-index/
Über Kommentare würde ich mich freuen.
Gruß, uffi
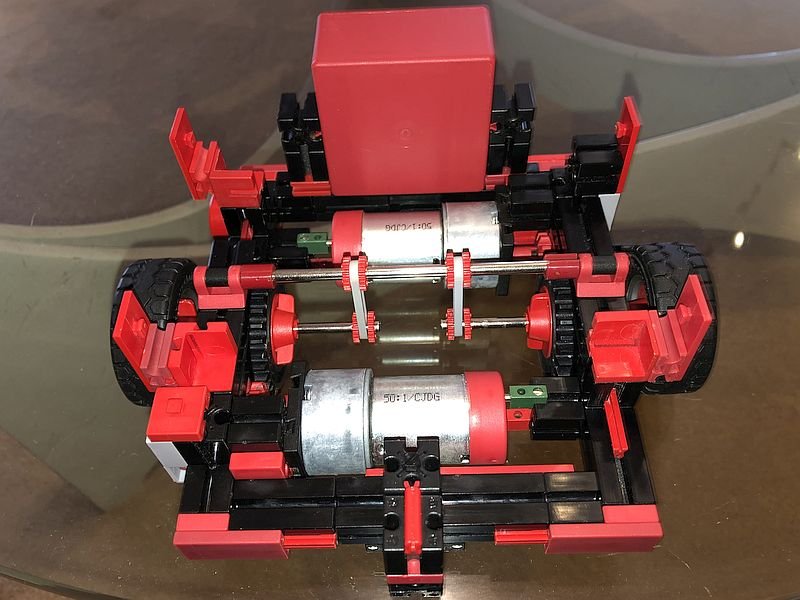
- IMG_2292_small.jpg (87.54 KiB) 11164 mal betrachtet
Re: Mobile Robots II Neukonstruktion
Verfasst: 18 Feb 2023, 18:01
von uffi
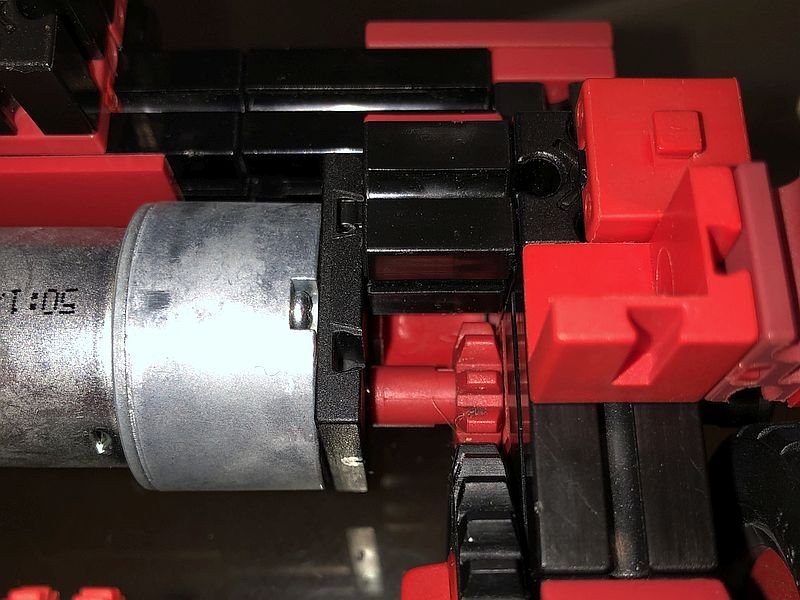
Hier noch ein paar Details zur Befestigung des Powermotors.
Aufhängung des Powermotors an der Steckerseite
- IMG_2293_small.jpg (101.97 KiB) 11160 mal betrachtet
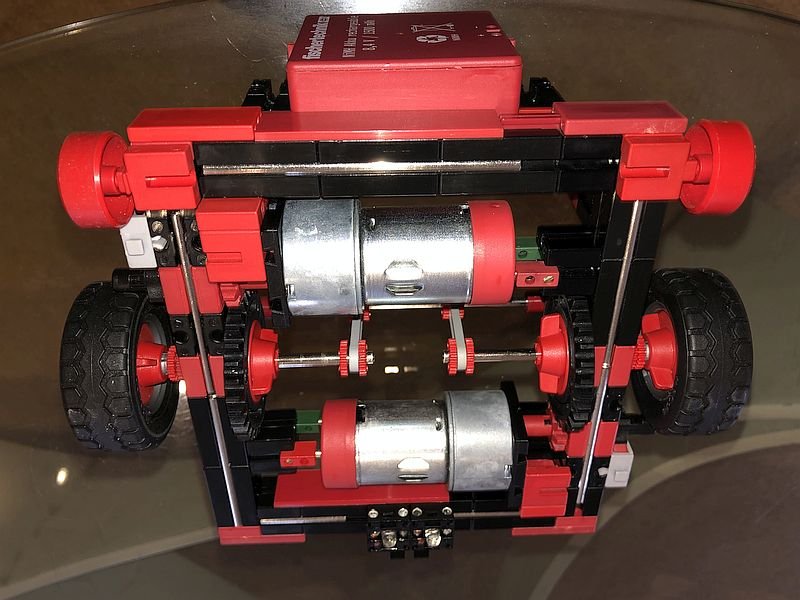
Aufhängung des Powermotors oben
- IMG_2297_small.jpg (88.87 KiB) 11160 mal betrachtet
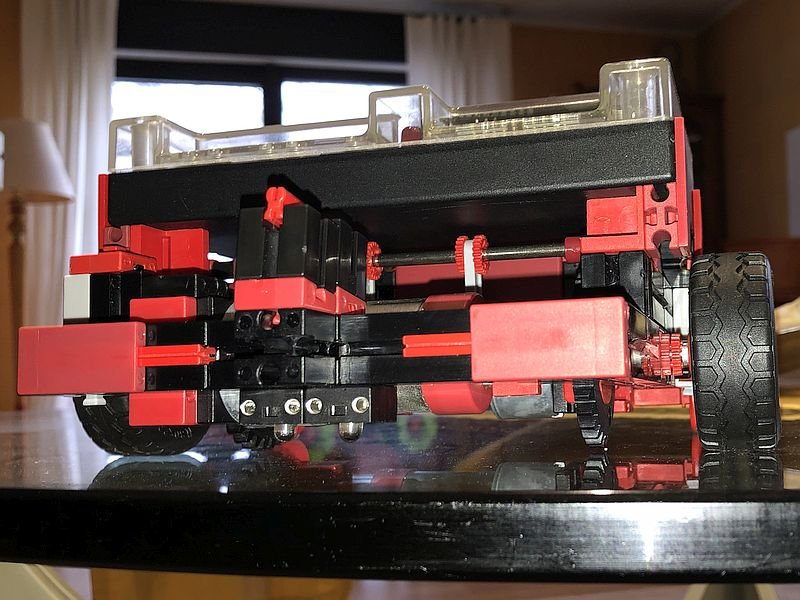
Aufhängung des Powermotors unten
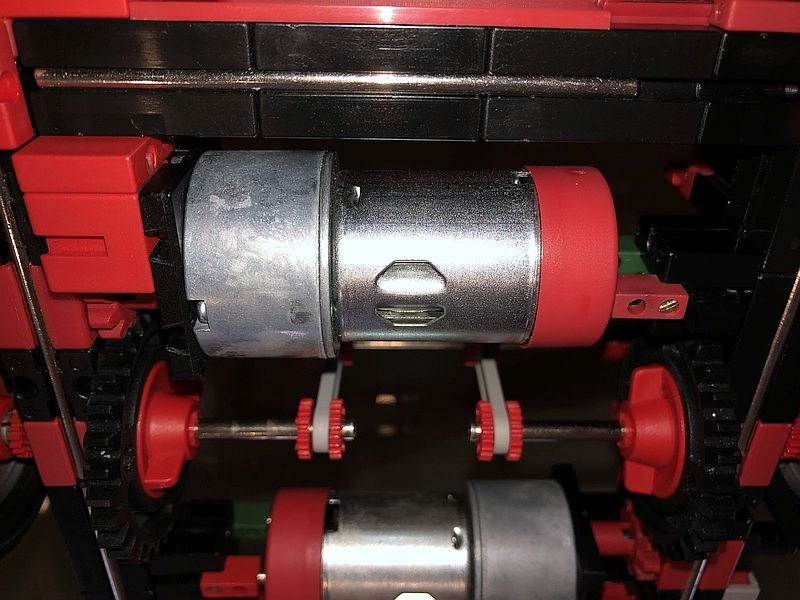
- IMG_2298_small.jpg (90.76 KiB) 11160 mal betrachtet
- IMG_2299_small.jpg (87.76 KiB) 11160 mal betrachtet
Re: Mobile Robots II Neukonstruktion
Verfasst: 18 Feb 2023, 18:04
von uffi
Encoder-Taster direkt an der Antriebachse:

- IMG_2295_small.jpg (63.29 KiB) 11158 mal betrachtet
Ansicht von unten
- IMG_2300_small.jpg (95.36 KiB) 11158 mal betrachtet
Ansicht von vorne
- IMG_2301_small.jpg (110.23 KiB) 11158 mal betrachtet
Re: Mobile Robots II Neukonstruktion
Verfasst: 18 Feb 2023, 18:05
von uffi
Re: Mobile Robots II Neukonstruktion
Verfasst: 27 Feb 2023, 19:20
von uffi
Mittlerweile habe ich das fahrerlose Transportsystem (Gabelstapler) fertig gebaut und es gibt auch ein Video davon:
https://youtu.be/66nxHxTqQp8
Hier noch Bilder vom Modell nach Fertigstellung als Gabelstapler.
Gesamtansicht:
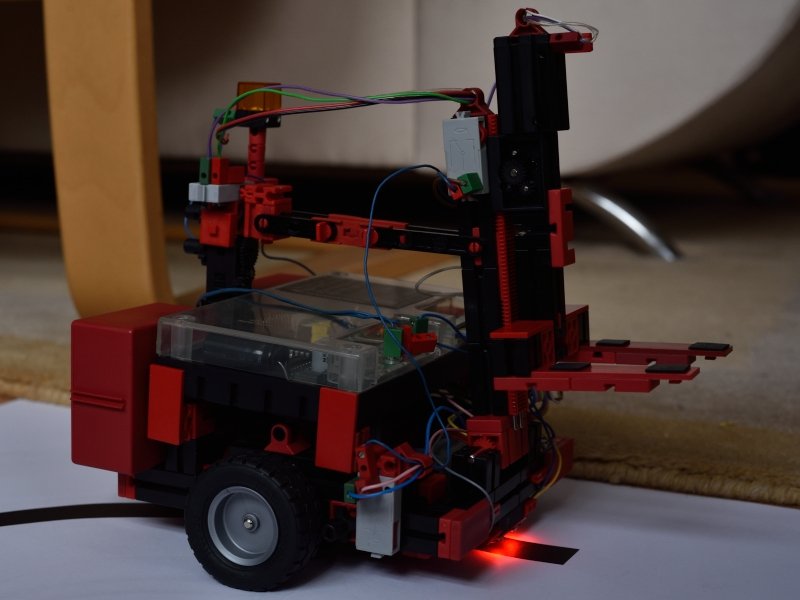
- DSC_3338_026.JPG (132.26 KiB) 10915 mal betrachtet
Ansicht von unten:
- DSC_3326_027.JPG (137.66 KiB) 10915 mal betrachtet
Spursensor aus 2 Fototransistoren und 2 darauf mit Teppichklebeband aufgeklebten roten LEDs:
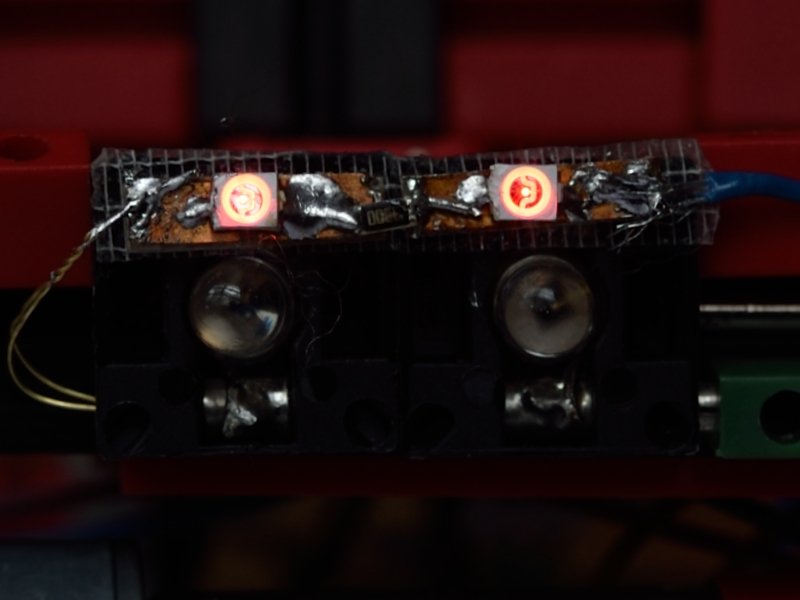
- DSC_3326_028.JPG (109.53 KiB) 10915 mal betrachtet
Re: Mobile Robots II Neukonstruktion
Verfasst: 27 Feb 2023, 22:32
von atzensepp
Sehr schön! Die Sensor-Optik wäre auch ein guter Grill für einen LKW.
Re: Mobile Robots II Neukonstruktion
Verfasst: 28 Feb 2023, 17:01
von uffi
Hallo atzensepp,
danke für die erste (Fremd-) Antwort in diesem Thread!
Ich dachte schon, ich sollte beim nächsten Mal lieber der Parkuhr von meinen Modellen erzählen, als diesem Forum.

Der LKW sollte dann wohl ein Mini-Modell sein.
Gruß, Dirk
Re: Mobile Robots II Neukonstruktion
Verfasst: 28 Feb 2023, 20:19
von atzensepp
Hallo Dirk,
was waren die größten Herausforderungen bei Deiner Konstruktion oder was findest Du besonders erwähnenswert?
Was mir aufgefallen ist:
- Metallachsen zur Verstärkung
- Taster als Encoder (prellt das nicht wie verrückt?)
- Fixierung der ft-STecker an den Motoren in 15-er Bausteinen
- leichtgewichtige Radaufhängung mit Statikstreben
- Halterung an der Front mit den 15-Grad-Winkeln (Warum?)
Florian
Re: Mobile Robots II Neukonstruktion
Verfasst: 28 Feb 2023, 22:37
von juh
atzensepp hat geschrieben: ↑28 Feb 2023, 20:19
- Taster als Encoder (prellt das nicht wie verrückt?)
Ich hatte das bei meinen Tastern mal ausgemessen, da waren die Prellzeiten alle <1ms (beim Reed-Schalter sogar <0,1ms). Wenn die Impulse also nicht schneller kommen (1000/s wären reichlich schnell...), kann das ja die Software auffangen. Aber ich bin gespannt auf Uffi's Lösung.
Habe mich auch hier übrigens, wie immer bei Uffis Modellen, gefreut es zu sehen, aber man hat halt nicht immer eine Frage oder Kommentar, also auch hier nur ein +1.

vg
Jan
Re: Mobile Robots II Neukonstruktion
Verfasst: 01 Mär 2023, 07:26
von Widi
Hallo uffi
Habe mich auch hier übrigens, wie immer bei Uffis Modellen, gefreut es zu sehen, aber man hat halt nicht immer eine Frage oder Kommentar
ganz super Deine Fotos man erkennt jedes detail
auch die Lösung für das schwenken der Gabel find ich gut !
Einziger kritikpunkt das nicht alles orginal FT ist
gruss widi
Re: Mobile Robots II Neukonstruktion
Verfasst: 01 Mär 2023, 15:46
von fishfriend
Hallo...
Warum hast du den Powermot hinten über die Stecker stabilisiert?
Ich hätte erwartet, dass die Buchsen ausleiern.
Ist die Abweichung so groß?
Gibt es bald einen Schwarm davon?
Mit freundlichen Grüßen
fishfriend
Holger Howey
Re: Mobile Robots II Neukonstruktion
Verfasst: 01 Mär 2023, 18:26
von uffi
Da freue ich mich über die vielen Antworten und Fragen und fange mal an mit Antworten dazu:
@atzensepp:
- Was ich selbst erwähnenswert finde sind die schon von Dir genannten Dinge sowie die Nutzung des alten Universal-Interfaces aufgepimpt mit einem AVR, der die Steuerung übernimmt, aber optisch nicht groß in Erscheinung tritt.
- Dabei habe ich die beiden analogen Eingänge des Universal-Interfaces direkt mit zwei Eingängen des ATtiny26 verschaltet und werte die Spannungen zwischen 20kOhm pull-up im AVR (parallel zum 100kOhm pullup im Interface) und den beiden Fototransistoren (an Minus) per AD-Wandlung aus und nutze die Differenz der beiden analogen Spannungen als Regelabweichung für einen P-Regler, der dann die PWM eines der beiden Motoren reduziert. Es gibt 16 PWM-Stufen. Dadurch ergibt sich ein schön gleichmäßiges Fahrverhalten auf der Spur und nicht so ein Gezuckel wie man es von den anderen Fischertechnik Spurfolgern so kennt.
- Zum Entprellen: Ich habe keinerlei Software-Maßnahmen diesbezüglich implementiert und mir scheint das Fahrverhalten auch keine Probleme zu zeigen, die auf Prellprobleme schließen lassen würden. Im Universal-Interface sind ja 1kOhm Pull-down Widerstände an den Eingängen des 4014 CMOS Schieberegisters implementiert. Das Register wird jede Millisekunde ausgelesen, aber Änderungen an den Tastern gibt es ja nur 3 (Untersetzung) *4 (Zähne) *2 (Wechsel je Zahn) = 24 je Radumdrehung. Mehr als eine Umdrehung pro Sekunde kommt da nicht zustande, also ca. alle 40 ms eine Änderung. Schätze mal, das Prellen fällt einfach nicht auf.
- Herausforderung war, die Helligkeit der LEDs auf der Spur so zu gestalten, dass es ein gutes Spannungsdelta zwischen schwarzer Linie und weißem Hintergrund an den 20kOhm pull-up Widerständen gibt. Und außerdem: eine direkte Beleuchtung der Fototransistoren zu vermeiden.
- Die 7,5 Grad-Bausteine an der Front habe ich wieder abgebaut. Das war im Original so vorgesehen und ich habe mich dann ja noch für eine motorisch verstellbare Vorrichtung für die Gabel entschieden.
Re: Mobile Robots II Neukonstruktion
Verfasst: 01 Mär 2023, 18:33
von uffi
@juh: interessante Infos zum Prellen der Taster, danke dafür. Danke auch für Dein nettes Feedback!
@widi: Ebenfalls danke für Dein Feedback. Ja, original FT hätte ich ja einen PC mit Verbindung zum Universal-Interface mit rumschleppen müssen (ich habe kein Intelligent Interface oder Robo-Interface). Hätte natürlich meinen TXT nehmen können, aber das hätte ich irgendwie unpassend gefunden.
@fishfriend: ich glaube da verbiegen eher die Stecker, als dass die Buchsen in den Powermots ausleiern. Ohne diese Lagerung auf der anderen Seite sinken die Powermots schon nach unten auf der Steckerseite. Meiner Meinung nach unschön.
Vielen Dank für Eure Antworten und Kommentare.
Gruß, uffi
Re: Mobile Robots II Neukonstruktion
Verfasst: 01 Mär 2023, 18:48
von uffi
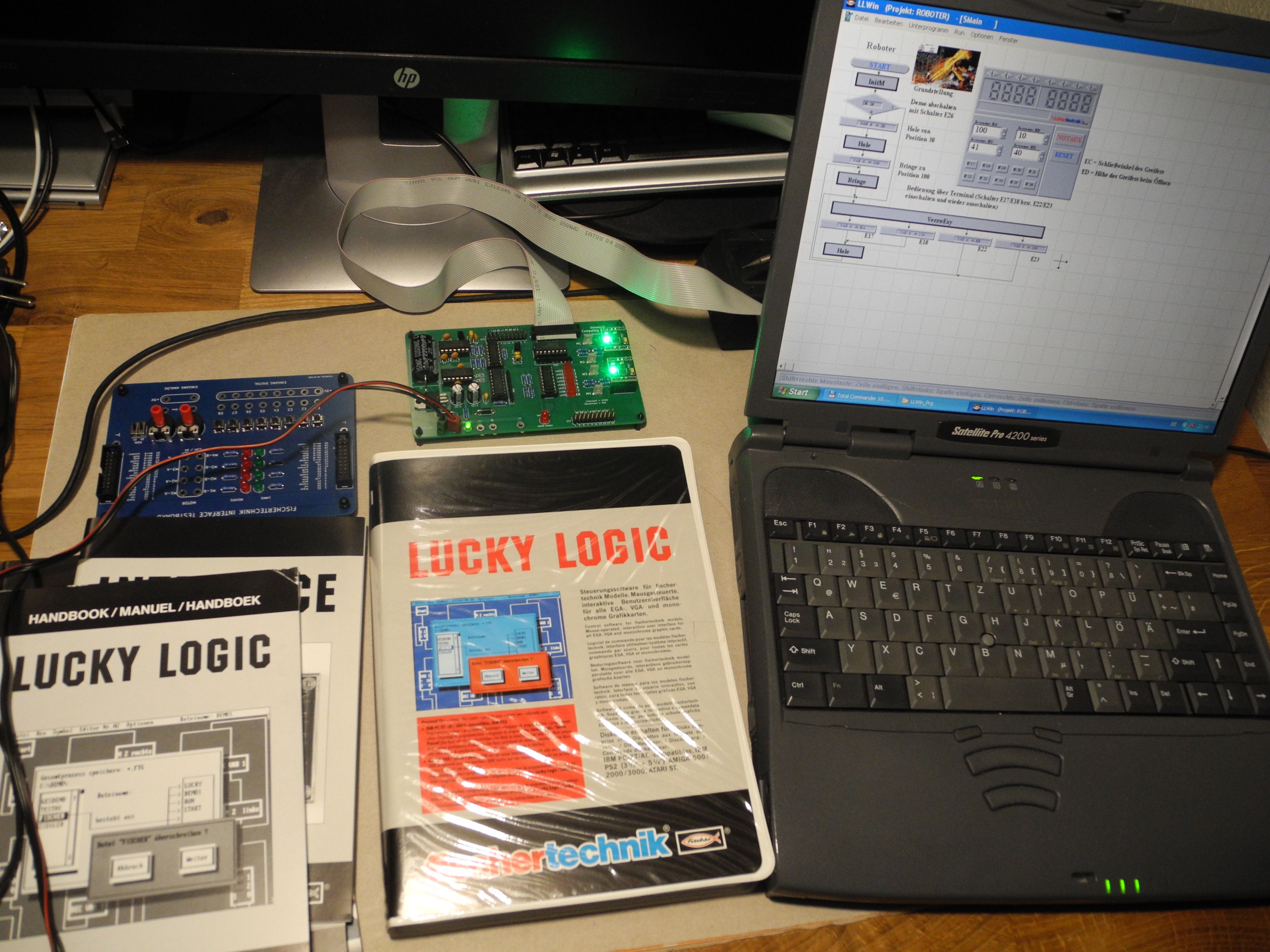
Noch zur Software auf dem AVR (C-Code), mit dem das Universal-Interface angesteuert wird. Dazu hatte ich mal einen Artikel in ft:pedia 2015-4 ab Seite 49 und der Download dazu ist hier zu finden:
https://ftcommunity.de/ftpedia/2015/2015-4/ftui_pwm/
Beschreibung dazu in meinem Artikel in ftpedia 2015 Ausgabe Nr. 4 ab Seite 49, siehe hier:
https://ftcommunity.de/ftpedia/2015/
Gruß, uffi
Re: Mobile Robots II Neukonstruktion
Verfasst: 23 Mär 2023, 10:49
von Fischer-Micha
Hallo Uffi
tolle Sache und prima umgesetzt.
Insbesondere die Nutzung vom alten Interface finde ich sehr interessant und ist mir selbst in den FT media noch nicht aufgefallen.
Derzeit baue ich selbst mehrere Roboter mit dem alten Interface auf (derzeit noch von einem C64 gesteuert)
Das Interface habe wir im Forum C64 mal komplett nachgebaut,..
aber dieses taucht ja immer mal wieder zum Verkauf auf..
- DSCN0001.JPG (2.27 MiB) 10295 mal betrachtet
Re: Mobile Robots II Neukonstruktion
Verfasst: 26 Mär 2023, 12:31
von uffi
Hallo Fischer-Micha,
ich freue mich über Dein Interesse. Vielleicht kannst Du ja so auch eins Deiner C64 Interfaces mobilisieren, also auf einem mobilen Roboter zum Einsatz bringen.
Gruß, uffi
Re: Mobile Robots II Neukonstruktion
Verfasst: 26 Mär 2023, 22:05
von fishfriend
Hallo...
Wie ist das eigentlich mit den C64er die man so in den letzten Jahren neu kaufen konnte.
Ich meine, die waren etwas kleiner und hatten Spiele mit dabei. Hatten die auch einen Userport um z.B. externe Hardware anzusteuern?
Ist halt die Frage ob man auf der Basis fischertechnik-Modelle steuern kann. Oder ob man die sogar integrieren kann.
Mit freundlichen Grüßen
fishfriend
Holger Howey
Re: Mobile Robots II Neukonstruktion
Verfasst: 27 Mär 2023, 15:55
von Fischer-Micha
fishfriend hat geschrieben: ↑26 Mär 2023, 22:05
Hallo...
Wie ist das eigentlich mit den C64er die man so in den letzten Jahren neu kaufen konnte.
Hallo Holger,..
nein, der C64 mini hatte kein Userport (oder besser gesagt.. nur Userport).
C64 gibt es heutzutage ja noch genügend.. ich selbst habe ein größere Anzahl

(>10 Stk

)
ansonsten ist der Nachbau C64 => Ultimate64 perfekt.. der hat moderne HDMI Ausgabe, und hat auch einen Userport.. und auch Expansionsport..
ich selbst möchte gerne die ganzen Interfaces vergleichen, daher habe ich mir noch ein TXT Controller gekauft und auch noch den "alten" durchsichtigen mit der COM Schnittstelle. (ein TXT4.0 war bisher noch zu teuer)..