And here is the description of the ride in more detail:
Start. A flashing LED indicates standby mode, and the push-button starts the ride.
Chain drive. The "passengers" (you'll have to really use your imagination here...) are picked up at the boarding station and pulled via a magnetic holder all the way up. For this I used a mini-motor with gearbox plus an 1:4 reduction and a gear 15 which slowly drives the chain up the incline.
Slow tracks and main drop. When the ball reaches the top, it starts a slow travel through a partial 8-shaped path that consists of four flexible tracks 180 and a pair of 260 mm metal axles, descends the main drop at high speed, then uphill and through a 180° curve. After that, another slow track starts with two pairs of axles 260 and two consecutive S-shaped curves.
Drive tire. Just before the end of the slow track, a luminosity sensor detects the ball. This starts a second mini-motor coupled to a 50 mm tire that rotates at high speed to give the ball a final impulse.
Tunnel and loop. Now the ball goes uphill again, follows two consecutive 90° turns, then is lead directly to the tunnel via a small flexible track 90. The tunnel itself is just a series of seven tubular sleeves which accelerate the ball enough to complete the upward loop.
Exit. Upon exiting the loop, the ball follows the exit track which consists of a high speed flexible rail which leads back back to the boarding station. At this time the lower reed sensor (a non-ft part) should have detected the passage of the magnetic holder so that the chain motor stops right before the ball pickup point. I just need to press the button again to start over.
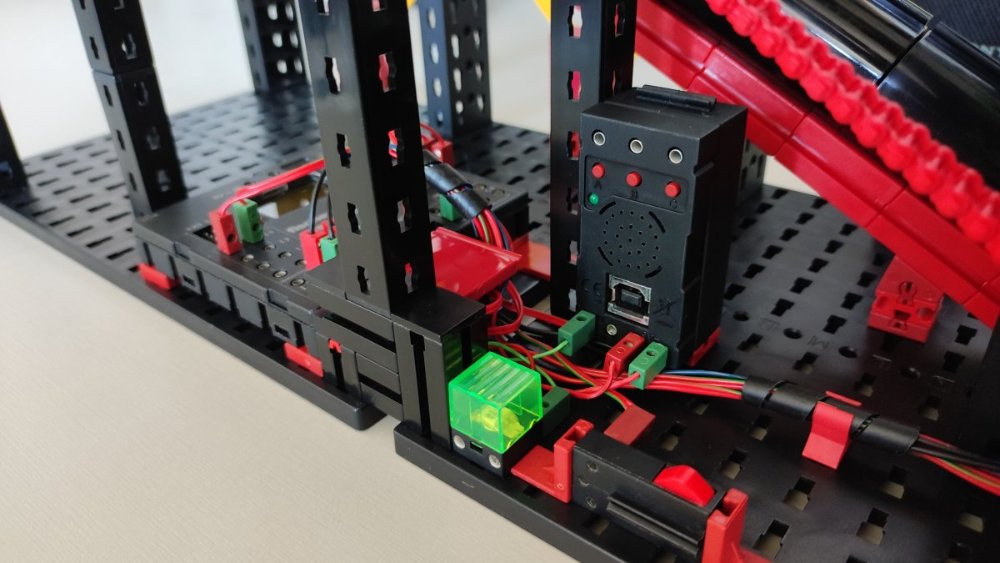
- Electronics.jpg (90.65 KiB) 3344 mal betrachtet
The electronics are straightforward. A TX controller runs a simple program that starts and stops the motors independently. In the whole process I've learned a few things and also ran into several difficulties which I might explain later on.
=========================== Google translate
Hier ist die Beschreibung der Fahrt im Detail:
Start. Eine blinkende LED zeigt den Standby-Modus an und der Druckknopf startet die Fahrt.
Kettenantrieb. Die „Passagiere“ (hier müssen Sie wirklich Ihre Vorstellungskraft einsetzen...) werden an der Einstiegsstation abgeholt und über eine Magnethalterung ganz nach oben gezogen. Dafür habe ich einen Mini-Motor mit Getriebe plus 1:4 Untersetzung und einem 15er Gang verwendet, der die Kette langsam die Steigung hinauf treibt.
Langsame Tracks und Main Drop. Wenn die Kugel die Spitze erreicht, beginnt sie eine langsame Reise durch einen teilweise 8-förmigen Pfad, der aus vier flexiblen 180-Schienen und einem Paar 260-mm-Metallachsen besteht, fährt den Hauptabfall mit hoher Geschwindigkeit hinunter, dann bergauf und durch einen 180 ° Kurve. Danach beginnt eine weitere langsame Strecke mit zwei Achspaaren 260 und zwei aufeinanderfolgenden S-förmigen Kurven.
Reifen fahren. Kurz vor dem Ende der langsamen Bahn erkennt ein Helligkeitssensor den Ball. Dies startet einen zweiten Minimotor, der mit einem 50-mm-Reifen gekoppelt ist, der sich mit hoher Geschwindigkeit dreht, um dem Ball einen letzten Impuls zu geben.
Tunnel und Schleife. Nun geht der Ball wieder bergauf, folgt zwei aufeinanderfolgenden 90°-Kehren und wird dann über eine kleine flexible Bahn 90 direkt zum Tunnel geführt. Der Tunnel selbst ist nur eine Reihe von sieben röhrenförmigen Hülsen, die den Ball ausreichend beschleunigen, um die Aufwärtsschleife zu vervollständigen.
Ausgang. Beim Verlassen der Schleife folgt der Ball der Ausgangsspur, die aus einer flexiblen Hochgeschwindigkeitsschiene besteht, die zurück zur Einstiegsstation führt. Zu diesem Zeitpunkt sollte der untere Reed-Sensor (ein Nicht-Fuß-Teil) den Durchgang des Magnethalters erkannt haben, so dass der Kettenmotor direkt vor dem Ballaufnahmepunkt stoppt. Ich muss nur die Taste erneut drücken, um von vorne zu beginnen.
Die Elektronik ist unkompliziert. Ein TX-Controller führt ein einfaches Programm aus, das die Motoren unabhängig voneinander startet und stoppt. Während des ganzen Prozesses habe ich einiges gelernt und bin auch auf einige Schwierigkeiten gestoßen, die ich vielleicht später erklären werde.
Rubem
