A short video:
 The magic ball track. by Frans, on FlickrThe magic ball track. by Frans, on Flickr
The magic ball track. by Frans, on FlickrThe magic ball track. by Frans, on Flickr
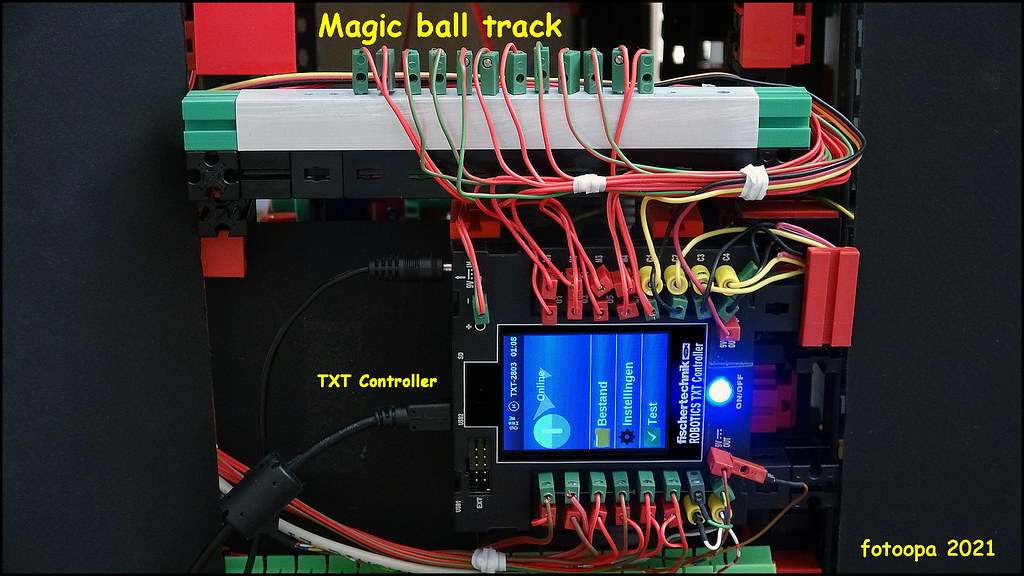
No, Only the regular standard TXT Controller is used. No additional external devives, no I2C. So you can use it with any type of controller, even Arduino or something similar that has the same amount of inputs and outputs as the TXT.







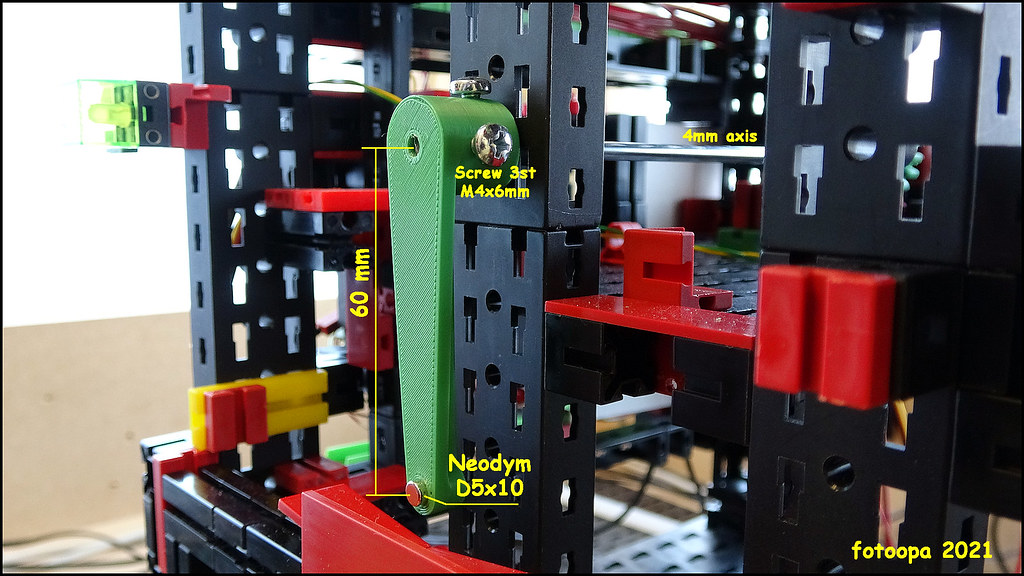
In theory sure, but you might need some additional measures against contact bouncing. Hall (or GMR) is less prone to such effects.
You're right. During the making of the video, the intention was already to show no direct solution. It had to appear magical. Pictures I did give. I would also give other pictures where the front plate is taken away so you see the whole construction. But I'm not going to make a video of it.PHabermehl hat geschrieben: ↑12 Sep 2021, 22:07It's a kind of magic. Wonderful. Although logically it must be magnetism, while watching it I thought, please don't show the back side, just let's keep believing in magic. Sooo nice to watch.
Peter
Yes that would work too. Even if some more vibrations occur it wouldn't be a problem. The program here only responds to the first edge. The other hall sensor that detects the ball is practical though. If there are no more balls the XS motor should stop after a few attempts. You could also give a message on the screen. By the way, the program is still very preliminary. There is still a lot of room for improvement in terms of safety, synchronization, powerup, emergency stop, etc.