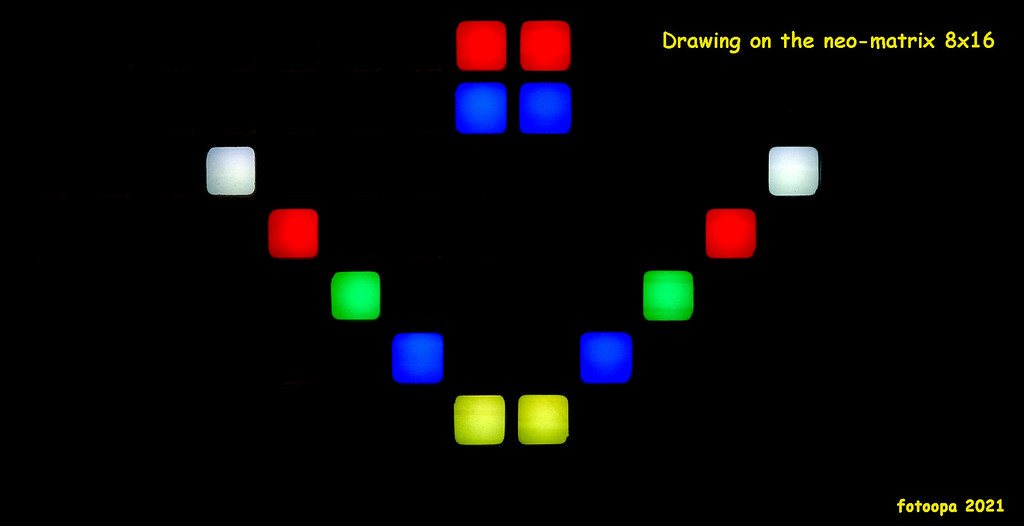
This allows the robot to make a drawing. It uses the content of the neo-display to determine where to place colored disks. The content of the drawing can be loaded from the flash memory or created directly with the editor.
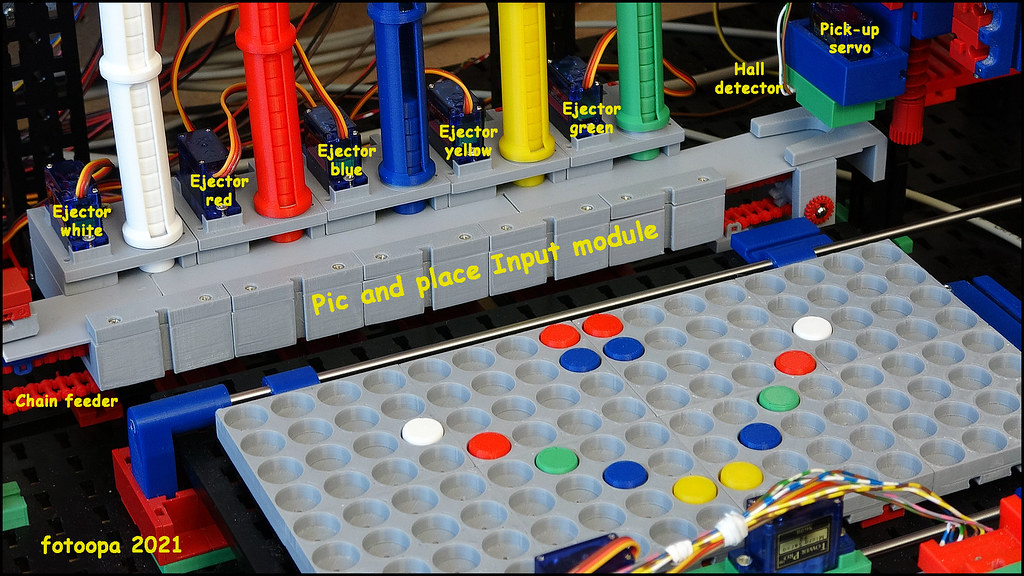
The input module is provided for 5 different colors. Each storage can hold over 40 discs. At the bottom of each storage tube is a servo ejector. When the robot needs a color it controls the right servo. This places the disc on the supply belt. A chain with a magnet holder moves the colored disc to the recording head of the robot. Each disc contains a small neodym magnet. This magnet is used for transport but also for detection on arrival at the robot holder. It also contains a hall detector. If the robot detects a disc, it continues with the placement.
The neo-matrix actually contains 2 blocks of 8x8. The scanning proceeds per block from top left to bottom right.

HD picture on Flickr: https://www.flickr.com/photos/fotoopa_hs/51301855836
HD picture on Flickr: https://www.flickr.com/photos/fotoopa_hs/51301110802
HD picture on Flickr: https://www.flickr.com/photos/fotoopa_hs/51301110812
The video:
 Pic and place robot make drawing. by Frans, on Flickr
Pic and place robot make drawing. by Frans, on FlickrWith this, I am gradually coming to the end of this project. A few more small updates and everything is finished. Meanwhile, the Robopro program file has become quite large (6.9 Mb).
It does not make sense to make the program available. You cannot run anything online without the FPGA I2C interface.
I have now also bought a second TXT controller. However, it also has the problem of regularly showing a blank display. To solve this problem I have placed the beta version 4.8.0 on the sd card and used it to boot. This made the display work normally. The existing Robopro program runs correctly on version 4.8.0 of the TXT.
Frans.