Hey Karl,
ja die Dinger für über Hundert aber die SC sind da echt günstig und gut. Ob langlebig ist dann noch die Frage.
Viel Spaß noch
Kräml
LeRobot LLM und fischertechnik?
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
Re: LeRobot LLM und fischertechnik?
Hallo zusammen,
ich hatte noch nicht die Zeit, mir die vielen interesanten Links genauer anzusehen, aber ein paar kurze Ergänzungen, sorry für eventuelle Doppelposts:
Für den AS5600 ist die ältere "runde" Platine besser für analoges Auslesen geeignet, denn den I2C-Stecker müsste man hier nachrüsten:
https://www.thingiverse.com/thing:3992842
Die neuere "weiße" Platine dagegen ist für analog und I2C gerüstet:
https://www.thingiverse.com/thing:6584690
Beide können aber grundsätzlich beides, und beide für wenige Euro zu haben.
Servos auszuschlachten scheint mir persönlich witzlos, denn der Sensor ist ja ein Potentiometer, da könnte man dann auch direkt ein Poti nehmen, zumindest wenn ein eingeschränkter Winkelbereich reicht, z.B. diese Piher-Lösung:
https://www.thingiverse.com/thing:3922753
Zum Thema Dreh- und Winkelsensor hatten wir ja schon mehrere Threads, in dem die verschiedenen Optionen diskutiert wurden, ich erinnere mich, dass es mind. von NBGer schon frühere Lösungen gab:
viewtopic.php?f=15&t=5566
viewtopic.php?f=15&t=7872
Für die Ansteuerung vieler DC-Motoren per I2C drei vielleicht noch interessante Optionen:
Von Adafruit gibt es dieses featherwing-shield, das sich per I2C aber auch von jedem anderen µC nutzen lässt, das bietet 4 Motorausgänge:
https://www.thingiverse.com/thing:5935909
Eine weitere Option wäre die verbreiteten I2C-Servo-Shields vom Typ PCA9685 in Kombination mit den zuletzt im "in den Medien"-Thread erwähnten DC-Treiber(platine)n wie TB6612 oder DRV8825 zu nutzen. Der DRV8825 etwa benötigt nur zwei PWM-Inputs per Motor, d.h. man könnte bis zu 8 Motoren per PCA9685 ansteuern, kleiner Nachteil, dass die max. PWM-Frequenz bei 1,5kHz liegt, das könnte je nach Anwendung zu wenig oder zu laut sein, ich hatte das aber mal als praktikabel getestet.
https://www.thingiverse.com/thing:3155362
Drittens gibt es das D1-mini Motorshield für 2 DC-Motoren für 'nen Appel und 'n Ei, bei der v1 muss man aber die Firmware patchen:
viewtopic.php?f=33&t=6359&p=47610&hilit ... are#p47610
Last not least: LeRobot nutzt zwar mit neuronalen Netzen und machine learning KI-Technologien, die auch von LLMs (Sprachmodellen) genutzt werden, mit LLMs hat das aber ansonsten nichts zu tun, die sind wie der Name ja sagt, auf die Interpretaion und Produktion von Texten spezialisiert, nicht auf Steuerung phyikalischer Systeme.
vg
Jan
ich hatte noch nicht die Zeit, mir die vielen interesanten Links genauer anzusehen, aber ein paar kurze Ergänzungen, sorry für eventuelle Doppelposts:
Für den AS5600 ist die ältere "runde" Platine besser für analoges Auslesen geeignet, denn den I2C-Stecker müsste man hier nachrüsten:
https://www.thingiverse.com/thing:3992842
Die neuere "weiße" Platine dagegen ist für analog und I2C gerüstet:
https://www.thingiverse.com/thing:6584690
Beide können aber grundsätzlich beides, und beide für wenige Euro zu haben.
Servos auszuschlachten scheint mir persönlich witzlos, denn der Sensor ist ja ein Potentiometer, da könnte man dann auch direkt ein Poti nehmen, zumindest wenn ein eingeschränkter Winkelbereich reicht, z.B. diese Piher-Lösung:
https://www.thingiverse.com/thing:3922753
Zum Thema Dreh- und Winkelsensor hatten wir ja schon mehrere Threads, in dem die verschiedenen Optionen diskutiert wurden, ich erinnere mich, dass es mind. von NBGer schon frühere Lösungen gab:
viewtopic.php?f=15&t=5566
viewtopic.php?f=15&t=7872
Für die Ansteuerung vieler DC-Motoren per I2C drei vielleicht noch interessante Optionen:
Von Adafruit gibt es dieses featherwing-shield, das sich per I2C aber auch von jedem anderen µC nutzen lässt, das bietet 4 Motorausgänge:
https://www.thingiverse.com/thing:5935909
Eine weitere Option wäre die verbreiteten I2C-Servo-Shields vom Typ PCA9685 in Kombination mit den zuletzt im "in den Medien"-Thread erwähnten DC-Treiber(platine)n wie TB6612 oder DRV8825 zu nutzen. Der DRV8825 etwa benötigt nur zwei PWM-Inputs per Motor, d.h. man könnte bis zu 8 Motoren per PCA9685 ansteuern, kleiner Nachteil, dass die max. PWM-Frequenz bei 1,5kHz liegt, das könnte je nach Anwendung zu wenig oder zu laut sein, ich hatte das aber mal als praktikabel getestet.
https://www.thingiverse.com/thing:3155362
Drittens gibt es das D1-mini Motorshield für 2 DC-Motoren für 'nen Appel und 'n Ei, bei der v1 muss man aber die Firmware patchen:
viewtopic.php?f=33&t=6359&p=47610&hilit ... are#p47610
Last not least: LeRobot nutzt zwar mit neuronalen Netzen und machine learning KI-Technologien, die auch von LLMs (Sprachmodellen) genutzt werden, mit LLMs hat das aber ansonsten nichts zu tun, die sind wie der Name ja sagt, auf die Interpretaion und Produktion von Texten spezialisiert, nicht auf Steuerung phyikalischer Systeme.
vg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: LeRobot LLM und fischertechnik?
Hallo,
Umrechunungen zu den Winkelwerten in den Servos mit magnetischen Winkelgebern sind ja im Arduino, Raspberry oder sonstigem Controller gut möglich.
Grund für das "Schlachten" von Servos bei "Ping" könnte sein, die ziehen die weitestgehende konstruktive Gleichheit der beiden "Robbis" in den Vordergrund. Anderseits wird sicherlich die Eingabe der magnetischen Sensor-Winkelwerte beim "Input-Robbi" durch manuelles Bedienen der Robotersegmente über das Bussystem von Vorteil sein. Zum Beispiel Verschleißfestigkeit, keine evtl. Störungen analoger Werte bei potentiometrischen Abtastungen etc.
Ich meine, die Servos mit den magnetischen Winkelsensoren brauchen nicht kpl. geschlachtet werden. Es sollte reichen den Motor "abzuklemmen". Eventuell noch ein Zahnrad/ritzel entfernen. Übertragungen der Messwerte sollte weiterhin über das Bussystem zum Controller erfolgen, so..., als wenn das Servo die Positionen korrigiert. Ausgabe der Korrekturimpulse zum Korrigieren der Roboterarme laufen im Servo dann halt ins Leere.
prinzipiell stimme ich Jans Meinung betreffend der Potis voll zu. Zumindest zur Eingabe der Positionswerte würden Potis ausreichen und die meist 250 Grad nutzbarer Winkel für Widerstandswerte, oder auch Spannungswerte bei Anwendung von Spannungsteilern.Servos auszuschlachten scheint mir persönlich witzlos, denn der Sensor ist ja ein Potentiometer, da könnte man dann auch direkt ein Poti nehmen, zumindest wenn ein eingeschränkter Winkelbereich reicht, z.B. diese Piher-Lösung:
Umrechunungen zu den Winkelwerten in den Servos mit magnetischen Winkelgebern sind ja im Arduino, Raspberry oder sonstigem Controller gut möglich.
Grund für das "Schlachten" von Servos bei "Ping" könnte sein, die ziehen die weitestgehende konstruktive Gleichheit der beiden "Robbis" in den Vordergrund. Anderseits wird sicherlich die Eingabe der magnetischen Sensor-Winkelwerte beim "Input-Robbi" durch manuelles Bedienen der Robotersegmente über das Bussystem von Vorteil sein. Zum Beispiel Verschleißfestigkeit, keine evtl. Störungen analoger Werte bei potentiometrischen Abtastungen etc.
Ich meine, die Servos mit den magnetischen Winkelsensoren brauchen nicht kpl. geschlachtet werden. Es sollte reichen den Motor "abzuklemmen". Eventuell noch ein Zahnrad/ritzel entfernen. Übertragungen der Messwerte sollte weiterhin über das Bussystem zum Controller erfolgen, so..., als wenn das Servo die Positionen korrigiert. Ausgabe der Korrekturimpulse zum Korrigieren der Roboterarme laufen im Servo dann halt ins Leere.
Re: LeRobot LLM und fischertechnik?
Hi,
Das ist dann genau das "Schlachten" wie oben beschrieben. Es wird ein Zahnrad entfernt, damit der Eingabeservo frei läuft. Die Arm-Position wird vom Servo als Integer ausgegeben und als Zielposition zum zweiten Arm als Interger weitergegeben.
Die Servos können prinzipiell 360° und haben eine Auflösung von 4096. @juh ist das mit Poti so einfach möglich? Das nächste wäre, diesen Wert als Input für den zweiten Servo als PWM zu geben, der auch ein genaues Poti hat. Dann noch ausregeln. Oder habe ich euch falsch verstanden?
Gruß Kräml
genauso wird das bei den Roboarmen gemacht.Karl hat geschrieben: ↑08 Apr 2025, 15:41... Eventuell noch ein Zahnrad/ritzel entfernen. Übertragungen der Messwerte sollte weiterhin über das Bussystem zum Controller erfolgen, so..., als wenn das Servo die Positionen korrigiert. Ausgabe der Korrekturimpulse zum Korrigieren der Roboterarme laufen im Servo dann halt ins Leere.
Das ist dann genau das "Schlachten" wie oben beschrieben. Es wird ein Zahnrad entfernt, damit der Eingabeservo frei läuft. Die Arm-Position wird vom Servo als Integer ausgegeben und als Zielposition zum zweiten Arm als Interger weitergegeben.
Die Servos können prinzipiell 360° und haben eine Auflösung von 4096. @juh ist das mit Poti so einfach möglich? Das nächste wäre, diesen Wert als Input für den zweiten Servo als PWM zu geben, der auch ein genaues Poti hat. Dann noch ausregeln. Oder habe ich euch falsch verstanden?
Gruß Kräml
Re: LeRobot LLM und fischertechnik?
Auch @Karl, natürlich macht es Sinn, dass Trainingsarm und Roboterarm sich hinsichtlich der Freiheitsgrade möglichst identisch bewegen. Wenn man im ft-Raster bleibt, sollte es aber keinen Unterschied machen, ob das Poti im Servogehäuse steckt oder nicht. Bezüglich der Drehwinkel, nein, ich schrieb ja schon, dass z.B. der Piher-Trimmer nur in Frage kommt, wenn einem der Winkel ausreicht, bei dem einen Demo, was ich mir angesehen habe, wäre das aber der Fall. Bezüglich der Auflösung hatte ich damals eine Testreihe gemacht, die müsste im oben verlinkten Thread zu finden sein, 4096 waren es sicher nicht. Im Zweifel würde ich aber wie Florian eher zum AS5600 o.Ä. greifen. Edit: Dies auch deswegen, weil das Piher im Test nicht völlig lineare Messwerte lieferte, wie ich gerade nochmal nachgelesen habe.kräml hat geschrieben: ↑08 Apr 2025, 17:36Die Servos können prinzipiell 360° und haben eine Auflösung von 4096. @juh ist das mit Poti so einfach möglich? Das nächste wäre, diesen Wert als Input für den zweiten Servo als PWM zu geben, der auch ein genaues Poti hat. Dann noch ausregeln. Oder habe ich euch falsch verstanden?
vg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
-
fishfriend

- Beiträge: 2210
- Registriert: 26 Nov 2010, 11:45
Re: LeRobot LLM und fischertechnik?
Hallo...
OK, ich bin mir nicht sicher, ob nicht doch bei sowohl bei Software und Hardware Panik angesagt ist.
Ich bin bei dem "Low Cost" (Koch) Arm und dem Bediengerät schon bei über 670€. Ich frage besser nicht was andere Systeme kosten.
Ich dachte bei der Software auf ein vorhandenes System aufsetzen zu können. Mal schauen...
Was mir noch aufgefallen ist, dass die Kamerasysteme vom Video nicht mit dem auf der Ausstellung übereinstimmen.
Die hatten eine Kamera nicht am Arm selbst. Aber Ok man kann es ja auch anders machen.
Ich gebe zu, mich schreckt der Preis ab. So wie ich das einschätze, hat man einmal ein (teures) Bussystem mit einem Anschluss, das man nun durch ein preiswertes "paralleles" System ersetzen möchte. Das parallele System sind halt die normalen Servos und eine Reihe von Encodern oder Potis.
Man muss irgendwie die Werte in das vorhandene Programm reinbekommen. Ich schätze das momentan als sehr aufwendig ein, da man auch noch Grundlagenarbeit leisten muss. Es wird wohl nur wenige Leute geben, die man fragen kann, wenn da was nicht läuft.
Ich hatte zu Angfang noch die Hoffnung, das mit ein paar TXT 4.0 hinzubekommen. Das dürfte wohl so nicht gehen.
Mit freundlichen Grüßen
Holger
OK, ich bin mir nicht sicher, ob nicht doch bei sowohl bei Software und Hardware Panik angesagt ist.
Ich bin bei dem "Low Cost" (Koch) Arm und dem Bediengerät schon bei über 670€. Ich frage besser nicht was andere Systeme kosten.
Ich dachte bei der Software auf ein vorhandenes System aufsetzen zu können. Mal schauen...
Was mir noch aufgefallen ist, dass die Kamerasysteme vom Video nicht mit dem auf der Ausstellung übereinstimmen.
Die hatten eine Kamera nicht am Arm selbst. Aber Ok man kann es ja auch anders machen.
Ich gebe zu, mich schreckt der Preis ab. So wie ich das einschätze, hat man einmal ein (teures) Bussystem mit einem Anschluss, das man nun durch ein preiswertes "paralleles" System ersetzen möchte. Das parallele System sind halt die normalen Servos und eine Reihe von Encodern oder Potis.
Man muss irgendwie die Werte in das vorhandene Programm reinbekommen. Ich schätze das momentan als sehr aufwendig ein, da man auch noch Grundlagenarbeit leisten muss. Es wird wohl nur wenige Leute geben, die man fragen kann, wenn da was nicht läuft.
Ich hatte zu Angfang noch die Hoffnung, das mit ein paar TXT 4.0 hinzubekommen. Das dürfte wohl so nicht gehen.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: LeRobot LLM und fischertechnik?
Hallo Holger,fishfriend hat geschrieben: ↑09 Apr 2025, 21:05Ich hatte zu Angfang noch die Hoffnung, das mit ein paar TXT 4.0 hinzubekommen. Das dürfte wohl so nicht gehen.
so in etwa hatte ich mir das auch vorgestellt.
Ich würde allerdings auf irgendwas mit Rechenpower setzen wollen wo LeRobot und ROS laufen und den TXT(4.0) oder einen Raspi zum reinen Ausführen nutzen.
Die Auswertung und zeitnahe Interpretation mehrerer Camera threads und die Ausführung des KI Modells würde ich nicht auf TXTs / TXT 4.0 machen.
Viele Grüße
Frank
Re: LeRobot LLM und fischertechnik?
Hallo Holger, die brauchst du heute bei Aufgaben wie diesen nicht mehr. Der KI-Chatbot deines Vertrauens (mir macht Mistral gerade viel Freude, es ist so viel fixer als ChatGPT) kann in der Regel wenn richtig gefragt wird fast alles erklären und dir bei Bedarf auch den Code schreiben, zwar nicht komplett als fertiges Produkt, aber als Codeschnipsel, die du Stück für Stück testen und zusammensetzen kannst, und wenn du mal was nicht verstehst, lässt du es dir vom Chatbot erklären.fishfriend hat geschrieben: ↑09 Apr 2025, 21:05Es wird wohl nur wenige Leute geben, die man fragen kann, wenn da was nicht läuft.
Und bezüglich der Kosten muss man ja nicht die Originalhardware verwenden, es gibt doch für alle erforderlichen Komponenten ft-Äquivalente oder Eigenbaualternativen.
Es wäre immer noch kein triviales Projekt, aber LLMs machen gerade bei solchen technischen Anwendungen, für die es genug Trainingsdaten gibt, heute vieles so unglaublich viel leichter und effizienter.
vg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: LeRobot LLM und fischertechnik?
Hallo,
ich habe mal einen Testaufbau mit 2 Motorshields und AS5600-Encodern zusammengesteckt und musste feststellen,
dass der AS5600 nur EINE i2c-Adresse hat. Die Adresse des pingleichen AS5600L kann dagegen programmiert werden.
Datenblatt: Kapitel "I2C Address Programming"
https://www.datasheets.com/de/part-deta ... -413938700
Leider sind bei mir nur die AS5600 drauf. D.h. man bräuchte einen weiteren i2C-Multiplexer, was jetzt auch nicht so schlimm ist. Denn die i2c-Adresse des TX9548 kann über 3 Leitungen eingestellt werden.
(Oder man bestellt sich AS5600L für 4 EUR das Stück und tauscht sie aus. Aber das wohl eher nicht)
Also vor Einkauf evtl. darauf achten, dass Ihr einen AS5600L bekommt.
Florian
ich habe mal einen Testaufbau mit 2 Motorshields und AS5600-Encodern zusammengesteckt und musste feststellen,
dass der AS5600 nur EINE i2c-Adresse hat. Die Adresse des pingleichen AS5600L kann dagegen programmiert werden.
Datenblatt: Kapitel "I2C Address Programming"
https://www.datasheets.com/de/part-deta ... -413938700
Leider sind bei mir nur die AS5600 drauf. D.h. man bräuchte einen weiteren i2C-Multiplexer, was jetzt auch nicht so schlimm ist. Denn die i2c-Adresse des TX9548 kann über 3 Leitungen eingestellt werden.
(Oder man bestellt sich AS5600L für 4 EUR das Stück und tauscht sie aus. Aber das wohl eher nicht)
Also vor Einkauf evtl. darauf achten, dass Ihr einen AS5600L bekommt.
Florian
Re: LeRobot LLM und fischertechnik?
Nach viel Rumprobiererei habe ich es geschafft,
2 Motoren und 2 AS5600-Sensoren über 2 TCA9548 anzusteuern:
Der Aufbau hat 2 Adafruit-i2C-Motorshields, 2 TCA9548-Multiplexer, 2 AS5600-Sensoren und ein Arduino-Uno:
Damit könnte man jetzt 8 Motoren (jeweils 2 i2C-Kanäle) ansteuern, und 14 Sensoren (z.B. AS5600) auslesen.
(Die Servo-Schnittstelle der Motor-Boards ist nur vom Arduino durchgeschleift. Für den Betrieb von mehreren Servos würde sich ein i2C-betreibenes Multi-Kanal-PWM-Board anbieten)
Erster TCA:
Kanal 0: Motor 1
Kanal 1: Motor 2
Kanal 2: AS5600 No. 1
Zweiter TCA:
Kanal 11: AS5600 No. 2
Lessons learnt:
- Die Motor-Shields brauchen 5V,3.3V, GND und SCL und SDA und natürlich externe Motor-Power-Supply
- Beim ersten TCA9584A: A0,A1,A2 auf GND, beim zweiten: A1,A2 auf GND und A0 auf 5V
- Die Resetleitungen der TCA's werden mit Pull-Up-Widerständen auf 5V gezogen
- Eigentlich logisch, aber hinterher ist man immer schlauer: Der TCA, der grad nicht gebraucht wird muss jeweils abgeschaltet werden.
Sonst sind 2 Kanäle offen.
- Beim Betrieb von mehreren i2C mit unterschiedlichen Adressen am gleichen Kanal kann es Einschränkungen wegen der Pull-Ups und Bus-Kapazitäten geben (nur gelesen)
Was man schon erkennen kann, wird da leicht ein Drahtverhau draus. Da muss man sich bei 8 Motoren was überlegen.
Vielleicht ein kleines Steuerkästchen wie von Karl mit Anschluss-Steckern. Motoren und Sensoren separat oder gleich über einen Stecker?
Das Breadboard braucht man eigentlich nicht. Die Platinen kann man im Kästchen befestigen.
2 Motoren und 2 AS5600-Sensoren über 2 TCA9548 anzusteuern:
Der Aufbau hat 2 Adafruit-i2C-Motorshields, 2 TCA9548-Multiplexer, 2 AS5600-Sensoren und ein Arduino-Uno:
- ZweiMotorshields.JPG (259.67 KiB) 3813 mal betrachtet
(Die Servo-Schnittstelle der Motor-Boards ist nur vom Arduino durchgeschleift. Für den Betrieb von mehreren Servos würde sich ein i2C-betreibenes Multi-Kanal-PWM-Board anbieten)
Erster TCA:
Kanal 0: Motor 1
Kanal 1: Motor 2
Kanal 2: AS5600 No. 1
Zweiter TCA:
Kanal 11: AS5600 No. 2
Lessons learnt:
- Die Motor-Shields brauchen 5V,3.3V, GND und SCL und SDA und natürlich externe Motor-Power-Supply
- Beim ersten TCA9584A: A0,A1,A2 auf GND, beim zweiten: A1,A2 auf GND und A0 auf 5V
- Die Resetleitungen der TCA's werden mit Pull-Up-Widerständen auf 5V gezogen
- Eigentlich logisch, aber hinterher ist man immer schlauer: Der TCA, der grad nicht gebraucht wird muss jeweils abgeschaltet werden.
Sonst sind 2 Kanäle offen.
- Beim Betrieb von mehreren i2C mit unterschiedlichen Adressen am gleichen Kanal kann es Einschränkungen wegen der Pull-Ups und Bus-Kapazitäten geben (nur gelesen)
Was man schon erkennen kann, wird da leicht ein Drahtverhau draus. Da muss man sich bei 8 Motoren was überlegen.
Vielleicht ein kleines Steuerkästchen wie von Karl mit Anschluss-Steckern. Motoren und Sensoren separat oder gleich über einen Stecker?
Das Breadboard braucht man eigentlich nicht. Die Platinen kann man im Kästchen befestigen.
-
fishfriend
- Beiträge: 2210
- Registriert: 26 Nov 2010, 11:45
Re: LeRobot LLM und fischertechnik?
Hallo...
Man könnte es noch etwas anders machen. Bei Seed Studio, gibt es die Hardware auch ohne die 3D Druckteile.
https://www.seeedstudio.com/SO-ARM100-L ... glMwSXd5fz
Man kann die Druckteile auch extra dazu kaufen.
https://www.seeedstudio.com/SO-ARM100-3 ... -6409.html
Es gibt noch andere Anbieter.
Etwas aufpassen sollte man aber. Insgesammt gibt es nicht -die- Servos für -den- SO-Arm 100.
Je nach Angebot und Version vom Arm, haben die unterschiedliche Spannungen und Kg (!)
Bei manchen sind die unterschiedliche vom Arm und dem EIngabegerät, bei anderen sind die gleich.
Zumindest scheint es ja eine ganze Reihe von Videos dazu zu geben. Wobei man auch sagen muss, das manche grotten schlecht sind.
Mit freundlichen Grüßen
Holger
Man könnte es noch etwas anders machen. Bei Seed Studio, gibt es die Hardware auch ohne die 3D Druckteile.
https://www.seeedstudio.com/SO-ARM100-L ... glMwSXd5fz
Man kann die Druckteile auch extra dazu kaufen.
https://www.seeedstudio.com/SO-ARM100-3 ... -6409.html
Es gibt noch andere Anbieter.
Etwas aufpassen sollte man aber. Insgesammt gibt es nicht -die- Servos für -den- SO-Arm 100.
Je nach Angebot und Version vom Arm, haben die unterschiedliche Spannungen und Kg (!)
Bei manchen sind die unterschiedliche vom Arm und dem EIngabegerät, bei anderen sind die gleich.
Zumindest scheint es ja eine ganze Reihe von Videos dazu zu geben. Wobei man auch sagen muss, das manche grotten schlecht sind.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: LeRobot LLM und fischertechnik?
Hallo,
Florian schrieb u. a.
mit Kühlschlitze:
viewtopic.php?f=6&t=8547#p65835
Florian schrieb u. a.
Mit relativ wenig Aufwand herzustellen, Fischertechnik kompatibel sowieVielleicht ein kleines Steuerkästchen wie von Karl mit Anschluss-Steckern. Motoren und Sensoren separat oder gleich über einen Stecker?
mit Kühlschlitze:
viewtopic.php?f=6&t=8547#p65835
-
fishfriend
- Beiträge: 2210
- Registriert: 26 Nov 2010, 11:45
Re: LeRobot LLM und fischertechnik?
Hallo...
Hier der Link zu einem neueren interessanten Video übe den Arm.
Hier wird eine alternative Eingabe über eine RS4 Kontroller gezeigt.
So kann man sich die Kosten für einen zweiten Eingabearm sparen.
Auch sagt er, dass sinvoller ist die Zahnräder nicht aus dem Leaderarm auszubauen, um gewisse Positionen zu halten.
https://www.youtube.com/watch?v=DeBLc2D6bvg
Mit freundlichen Grüßen
Holger
Hier der Link zu einem neueren interessanten Video übe den Arm.
Hier wird eine alternative Eingabe über eine RS4 Kontroller gezeigt.
So kann man sich die Kosten für einen zweiten Eingabearm sparen.
Auch sagt er, dass sinvoller ist die Zahnräder nicht aus dem Leaderarm auszubauen, um gewisse Positionen zu halten.
https://www.youtube.com/watch?v=DeBLc2D6bvg
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: LeRobot LLM und fischertechnik?
Wenn man einen 6-armigen Roboter mit normalen ft-Teilen bauen möchte, was wäre dann Eurer Meinung nach der beste Ansatz?
Wie es ft selber vorschlägt:
https://www.fischertechnikwebshop.com/d ... 1894-de-de
oder wie das schon epische Modell von bumm tschick:
https://www.youtube.com/results?search_ ... hertechnik
Wie es ft selber vorschlägt:
https://www.fischertechnikwebshop.com/d ... 1894-de-de
oder wie das schon epische Modell von bumm tschick:
https://www.youtube.com/results?search_ ... hertechnik
-
fishfriend
- Beiträge: 2210
- Registriert: 26 Nov 2010, 11:45
Re: LeRobot LLM und fischertechnik?
Hallo...
Ich denke der erste.
Schau dir das von mir gepostete Video noch mal an.
Wenn man die 30kg Servos nimmt hat man ca. maximal 400g Hebekraft.
Scheinbar hat der Hersteller der Servos noch eine Art Spezialversion hergestellt, die wohl eine andere Untersetzung haben.
Es ist wohl so, dass man extra einen PID Regler nutzen muss um ein Wackeln zu verhindern.
Mit freundlichen Grüßen
Holger
Ich denke der erste.
Schau dir das von mir gepostete Video noch mal an.
Wenn man die 30kg Servos nimmt hat man ca. maximal 400g Hebekraft.
Scheinbar hat der Hersteller der Servos noch eine Art Spezialversion hergestellt, die wohl eine andere Untersetzung haben.
Es ist wohl so, dass man extra einen PID Regler nutzen muss um ein Wackeln zu verhindern.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: LeRobot LLM und fischertechnik?
Hallo Holger,fishfriend hat geschrieben: ↑13 Apr 2025, 19:06Hallo...
Ich denke der erste.
Schau dir das von mir gepostete Video noch mal an.
Wenn man die 30kg Servos nimmt hat man ca. maximal 400g Hebekraft.
Scheinbar hat der Hersteller der Servos noch eine Art Spezialversion hergestellt, die wohl eine andere Untersetzung haben.
Es ist wohl so, dass man extra einen PID Regler nutzen muss um ein Wackeln zu verhindern.
Mit freundlichen Grüßen
Holger
willst Du dann eher den 3D-Frame nehmen oder ein Modell aus ft bauen. Falls letzteres: wie würdest Du die Servos mit ft verbinden?
Mit den Spezialteilen, die in dem Bionics-Satz enthalten sind?
-
fishfriend
- Beiträge: 2210
- Registriert: 26 Nov 2010, 11:45
Re: LeRobot LLM und fischertechnik?
Hallo...
Das mit der Verbindung vom Servo zum fischertechnik hatte ich mir gedacht, es anzuschrauben.
Oder man nimmt sofort ft-Alu oder Makerbeam von ffm.
Zuerst hatte ich noch einfache rote ft-Bauplatten mit Zapfen überlegt, wiel davon hab ich viele. ich denke aber, das der Hebel bei 50 cm etwas zuviel für die werden.
ich muss mir erstmal etwas von der Elektronik und Servos kaufen und mal etwas damit rumspielen.
Man könnte auch die STL-Dateien für ft modifizieren. Ich habe dafür aber gerade keine Zeit.
Mit freundlichen Grüßen
Holger
Das mit der Verbindung vom Servo zum fischertechnik hatte ich mir gedacht, es anzuschrauben.
Oder man nimmt sofort ft-Alu oder Makerbeam von ffm.
Zuerst hatte ich noch einfache rote ft-Bauplatten mit Zapfen überlegt, wiel davon hab ich viele. ich denke aber, das der Hebel bei 50 cm etwas zuviel für die werden.
ich muss mir erstmal etwas von der Elektronik und Servos kaufen und mal etwas damit rumspielen.
Man könnte auch die STL-Dateien für ft modifizieren. Ich habe dafür aber gerade keine Zeit.
Mit freundlichen Grüßen
Holger
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: LeRobot LLM und fischertechnik?
Hallo,
hier mal die zwei Serial Bus Servo von Waveshare:
https://www.waveshare.com/st3215-servo.htm
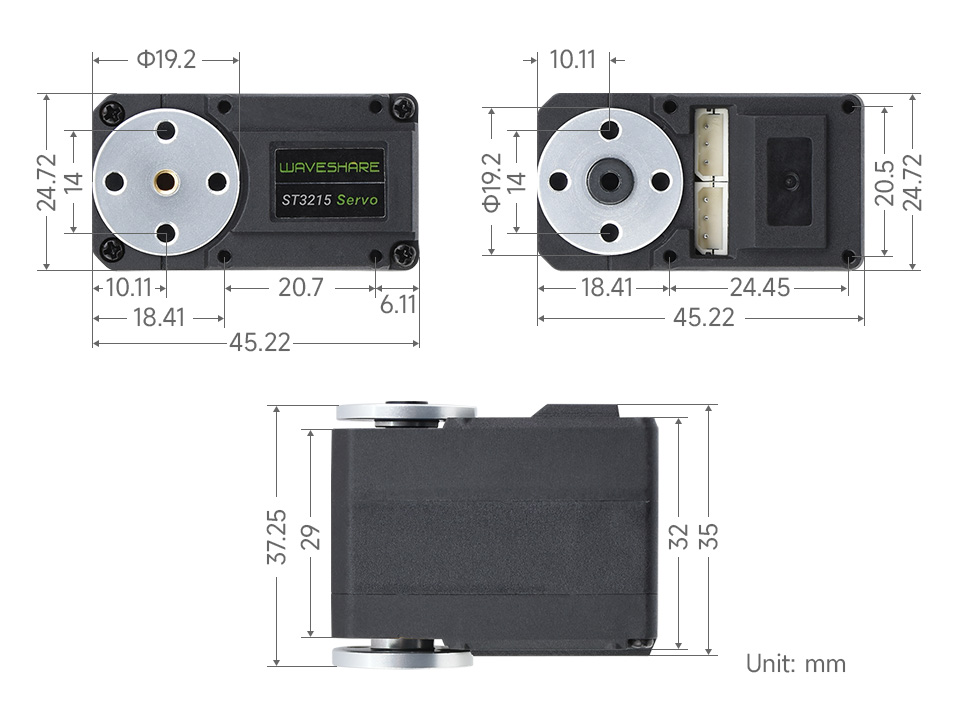
https://www.waveshare.com/st3235-servo.htm
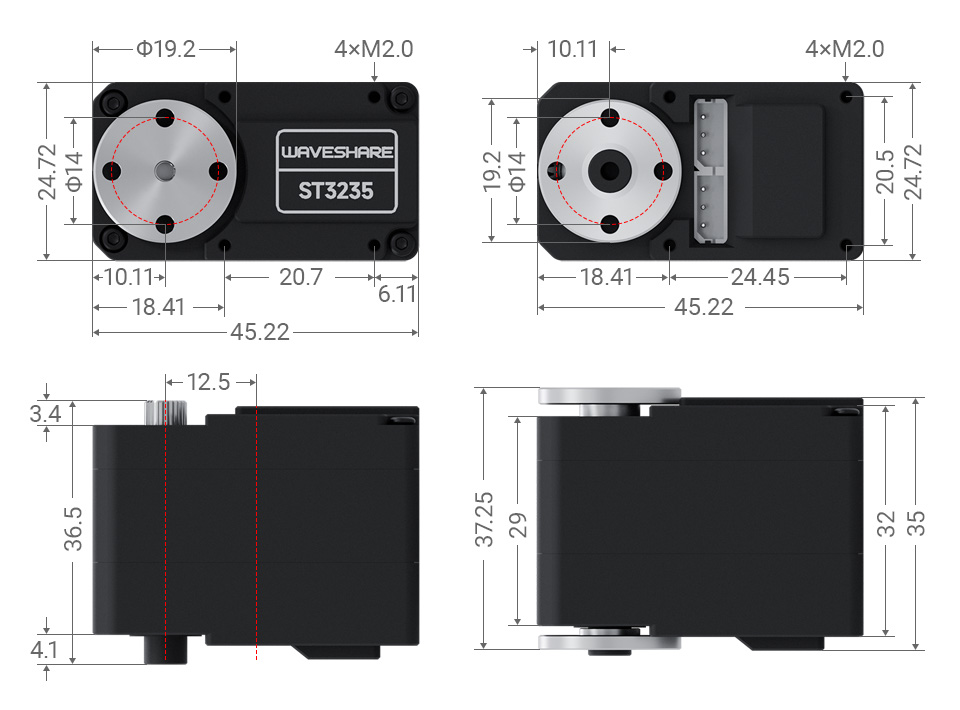
Beide Webseiten haben am Ende den Abschnitt Outline Dimensions.
Der einzige Unterschied ist das Alugehäuse. Denke, die anderen Werte, auch beide haben 30kg, sind identisch.
Dieser hier ist stärker und schmäler:
https://www.waveshare.com/ST3025-Servo.htm
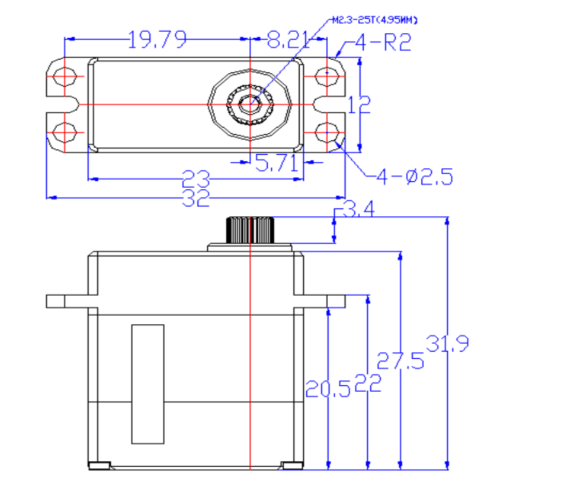
Von Feetech gibt es die gleichen wie von Waveshare, aber auch in 7,4V Serial Bus Servo.
https://www.feetechrc.com/74v-19-kgcm-p ... -gear.html
Welche billiger sind, hab ich nicht erfragt. Wollte hier nur die unterschiedlichen Typen aufzeigen.
Ja wäre schön, wenn man die mit Fischertechnik verbinden könnte. Aber auch leider keine Zeit.
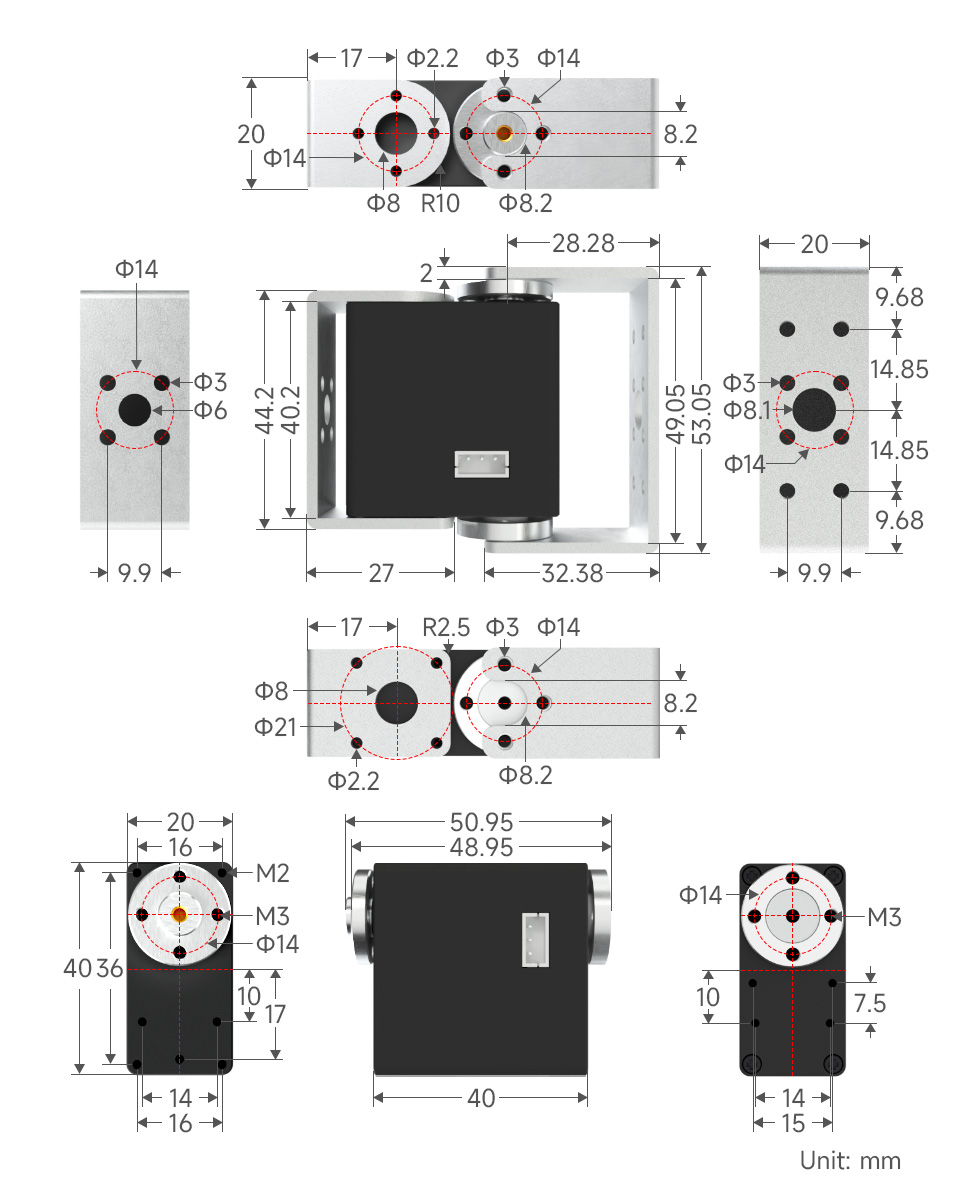
Diesen hier würde evtl. in die Makerfassung passen. ABER bitte noch überprüfen:
https://www.feetechrc.com/product-name_55300.html
Gruß Kräml
hier mal die zwei Serial Bus Servo von Waveshare:
https://www.waveshare.com/st3215-servo.htm
https://www.waveshare.com/st3235-servo.htm
Beide Webseiten haben am Ende den Abschnitt Outline Dimensions.
Der einzige Unterschied ist das Alugehäuse. Denke, die anderen Werte, auch beide haben 30kg, sind identisch.
Dieser hier ist stärker und schmäler:
https://www.waveshare.com/ST3025-Servo.htm
Von Feetech gibt es die gleichen wie von Waveshare, aber auch in 7,4V Serial Bus Servo.
https://www.feetechrc.com/74v-19-kgcm-p ... -gear.html
Welche billiger sind, hab ich nicht erfragt. Wollte hier nur die unterschiedlichen Typen aufzeigen.
Ja wäre schön, wenn man die mit Fischertechnik verbinden könnte. Aber auch leider keine Zeit.
Diesen hier würde evtl. in die Makerfassung passen. ABER bitte noch überprüfen:
https://www.feetechrc.com/product-name_55300.html
Gruß Kräml
Re: LeRobot LLM und fischertechnik?
Hallo,
danke an Kräml für die Informationen und Links.
Ein Servo für 40kg/cm klingt erst einmal wie ein "Super-Servo". Die Werte dann mit
den Nennwerten laut Angaben des Herstellers für die entsprechende Kraft.
Habe mal versuchsweise eine laienhafte "Lastskizze" erstellt. Hoffe die ist soweit richtig und verständlich.
[ 40kg/cm ] sind eigentlich keine korrekte Angabe aber belassen wir es mal so.
Es sind drei Servos mit zwei Lastarmen von jeweils 10cm.
Man sieht, gerade bei einer horizontalen gestreckten Länge eines Gliedes von einem Gliedermaßstab
sind schon weniger als 2 kg Hebelast möglich ohne das erste Servo, (glaube, Schulterservo genannt),
zu überlasten.
Dabei sind Reibungen, Zusatzmassen wie u. a. ein radiales (Hand-)Drehgelenk samt kurzem Arm sowie eine
Greifvorrichtung noch nicht einmal berücksichtigt.
Da darf die Masse eines Objektes in der Greifvorrichtung letztendlich nur noch gering sein.
Na ja, es wird bei einem Robotersystem selten vorkommen horizontal die max. gestreckte Länge zu nutzen.

danke an Kräml für die Informationen und Links.
Ein Servo für 40kg/cm klingt erst einmal wie ein "Super-Servo". Die Werte dann mit
den Nennwerten laut Angaben des Herstellers für die entsprechende Kraft.
Habe mal versuchsweise eine laienhafte "Lastskizze" erstellt. Hoffe die ist soweit richtig und verständlich.
[ 40kg/cm ] sind eigentlich keine korrekte Angabe aber belassen wir es mal so.
Es sind drei Servos mit zwei Lastarmen von jeweils 10cm.
Man sieht, gerade bei einer horizontalen gestreckten Länge eines Gliedes von einem Gliedermaßstab
sind schon weniger als 2 kg Hebelast möglich ohne das erste Servo, (glaube, Schulterservo genannt),
zu überlasten.
Dabei sind Reibungen, Zusatzmassen wie u. a. ein radiales (Hand-)Drehgelenk samt kurzem Arm sowie eine
Greifvorrichtung noch nicht einmal berücksichtigt.
Da darf die Masse eines Objektes in der Greifvorrichtung letztendlich nur noch gering sein.
Na ja, es wird bei einem Robotersystem selten vorkommen horizontal die max. gestreckte Länge zu nutzen.
- Dateianhänge
-
- Servokraefte-1.JPG (28.76 KiB) 3272 mal betrachtet
Re: LeRobot LLM und fischertechnik?
Hallo Karl,
danke für die Skizze. Dass die Servos keine Kraftwunder sind, ist klar. Es gibt andere die mehr können aber dann sehr teuer sind.
https://www.waveshare.com/rsbl85-12.htm

Aber darum ging es mir auch nicht, sondern um den Datenaustausch der Servos in beide Richtungen. Damit sind Steuerwege und Positionierungen möglich, die mit normalen Servos (PWM) nicht so einfach möglich sind.
Das Video oben zeigt ja, dass die Nutzlast des kleinen So-Arms nicht groß ist. Sie liegt zwischen 200 und 300 Gramm. Das ist nicht viel. Die Abmessungen des So-Arms habe ich hier nicht.
Deshalb hat der RoArm hier auch zwei starke Servos als "Schultergelenk".

Übrigens habe ich nichts mit der Firma Waveshare zu tun und dies soll keine Werbung sein. Ich finde den So-Arm100 zum Selberbauen eigentlich viel besser.
Um auf das Thema LeRobot LLM zurückzukommen. Wenn man diese mit Fischertechnik verwenden möchte, würde ich den So-Arm100 mit seinen Servos als Blaupause verwenden und nur die mechanischen Maße der LLM angeben.
Gruß Kräml
danke für die Skizze. Dass die Servos keine Kraftwunder sind, ist klar. Es gibt andere die mehr können aber dann sehr teuer sind.
https://www.waveshare.com/rsbl85-12.htm
Aber darum ging es mir auch nicht, sondern um den Datenaustausch der Servos in beide Richtungen. Damit sind Steuerwege und Positionierungen möglich, die mit normalen Servos (PWM) nicht so einfach möglich sind.
Das Video oben zeigt ja, dass die Nutzlast des kleinen So-Arms nicht groß ist. Sie liegt zwischen 200 und 300 Gramm. Das ist nicht viel. Die Abmessungen des So-Arms habe ich hier nicht.
Deshalb hat der RoArm hier auch zwei starke Servos als "Schultergelenk".
Übrigens habe ich nichts mit der Firma Waveshare zu tun und dies soll keine Werbung sein. Ich finde den So-Arm100 zum Selberbauen eigentlich viel besser.
Um auf das Thema LeRobot LLM zurückzukommen. Wenn man diese mit Fischertechnik verwenden möchte, würde ich den So-Arm100 mit seinen Servos als Blaupause verwenden und nur die mechanischen Maße der LLM angeben.
Gruß Kräml