Bislang habe ich für die Möbiusbahn immer Vehikel mit einem Motor und starrer Antriebsachse gebaut. Dafür ist ein Differential notwendig, da sich ohne Differential die Achse verkantet und das Vehikel entgleist. Eine Achsschenkel-Lenkung (Ackermann-Geometrie) kann immer nur vorne verwendet werden.
Eine Achsschenkel-Lenkung an der Antriebsachse würde Achsgelenke erfordern, die dann mit normalen Fischertechnik-Bauelementen die von mir gewählte Spurbreite sprengt. Im Folgenden stelle ich eine kleine Entwicklungs-Serie vor, die von folgender beidachsiger Achsschenkel-Lenkung ausgeht:
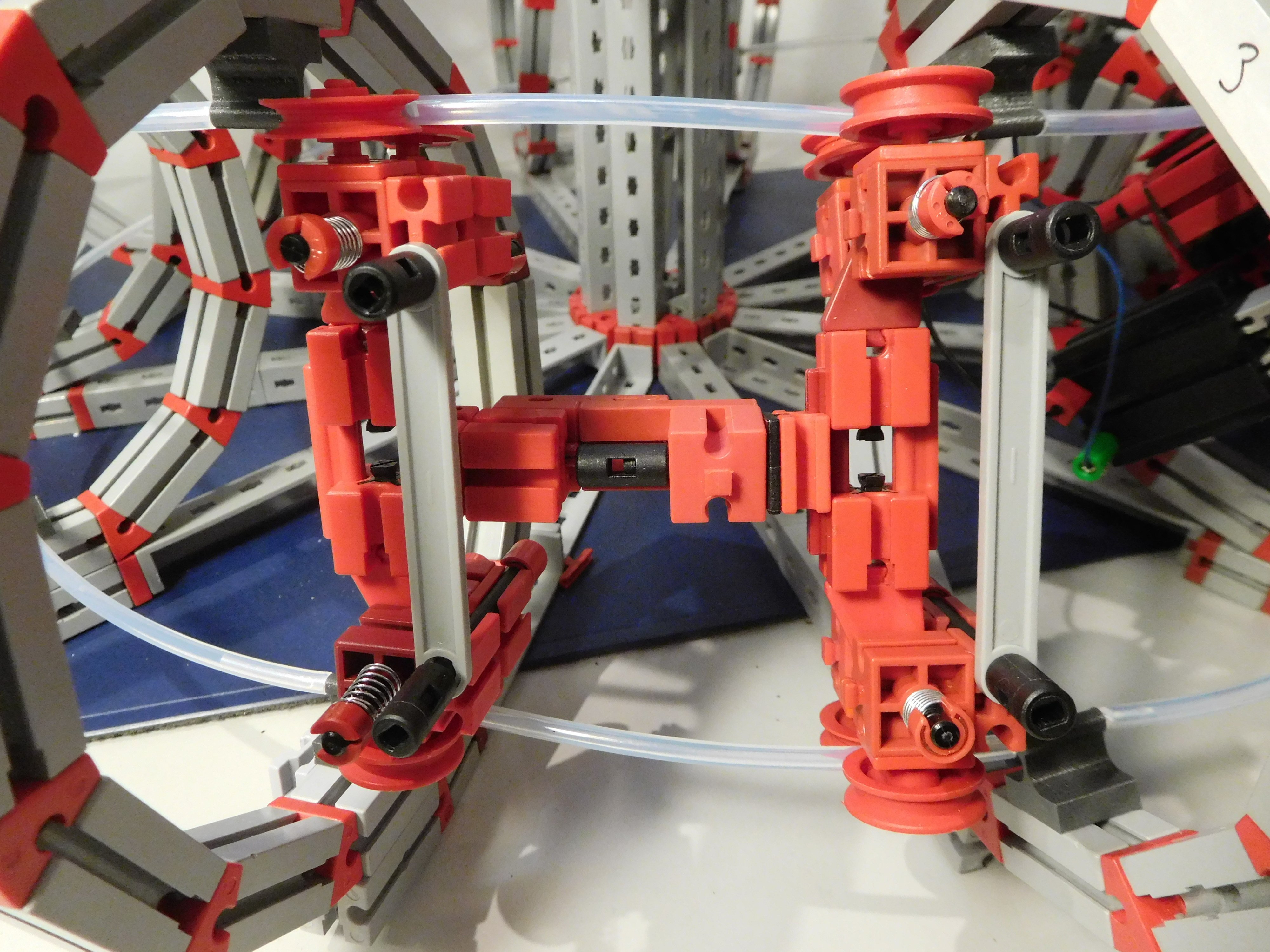
- Dublett_ASL.JPG (1.45 MiB) 8146 mal betrachtet
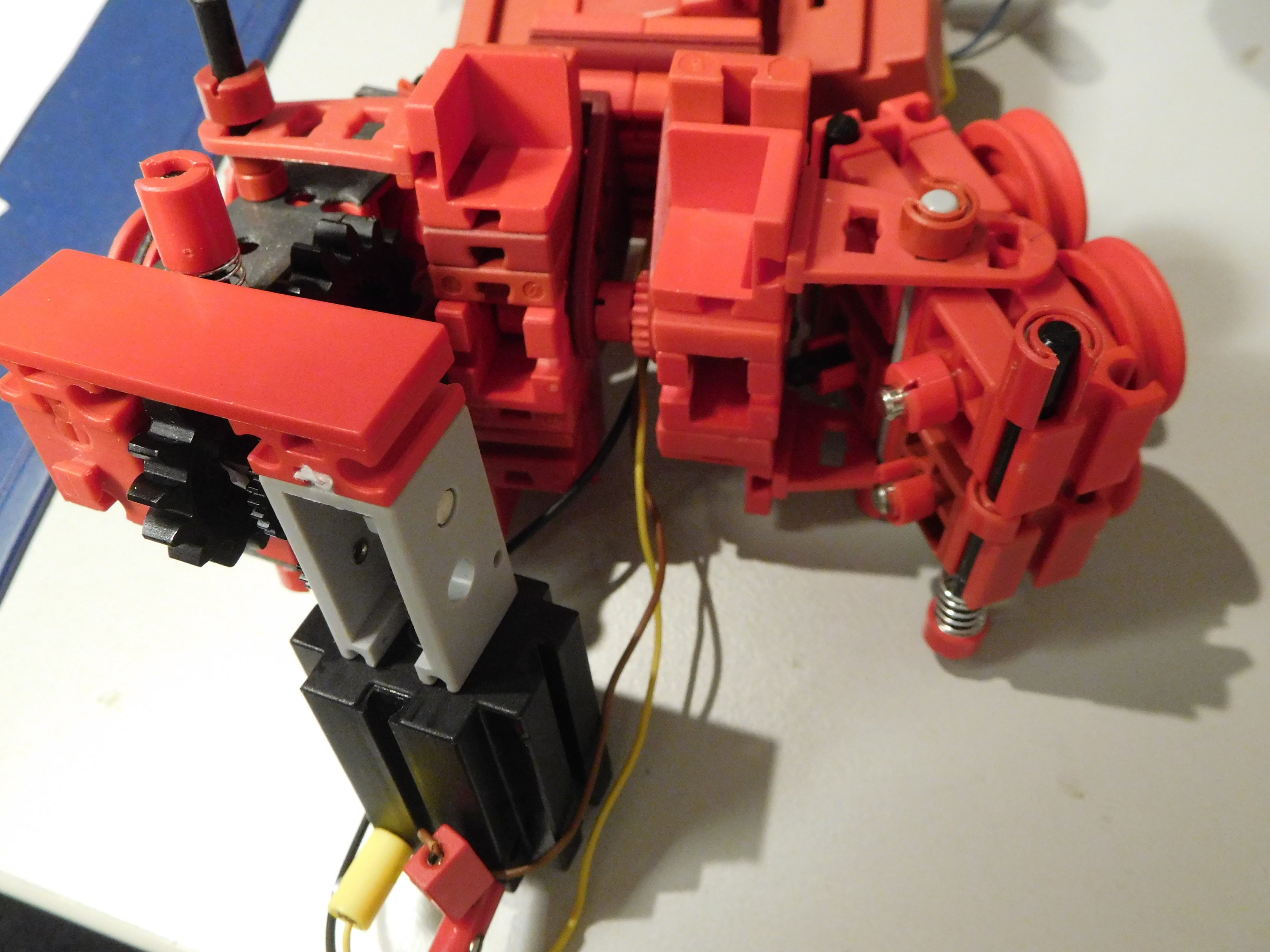
Da ich den Antrieb beider Achsen mit einem Motor nicht hinbekommen habe also ein Versuch mit 2 Mini-Motoren, die gewissermaßen als Radmotoren fungieren und sich bei Lenkung mitdrehen:
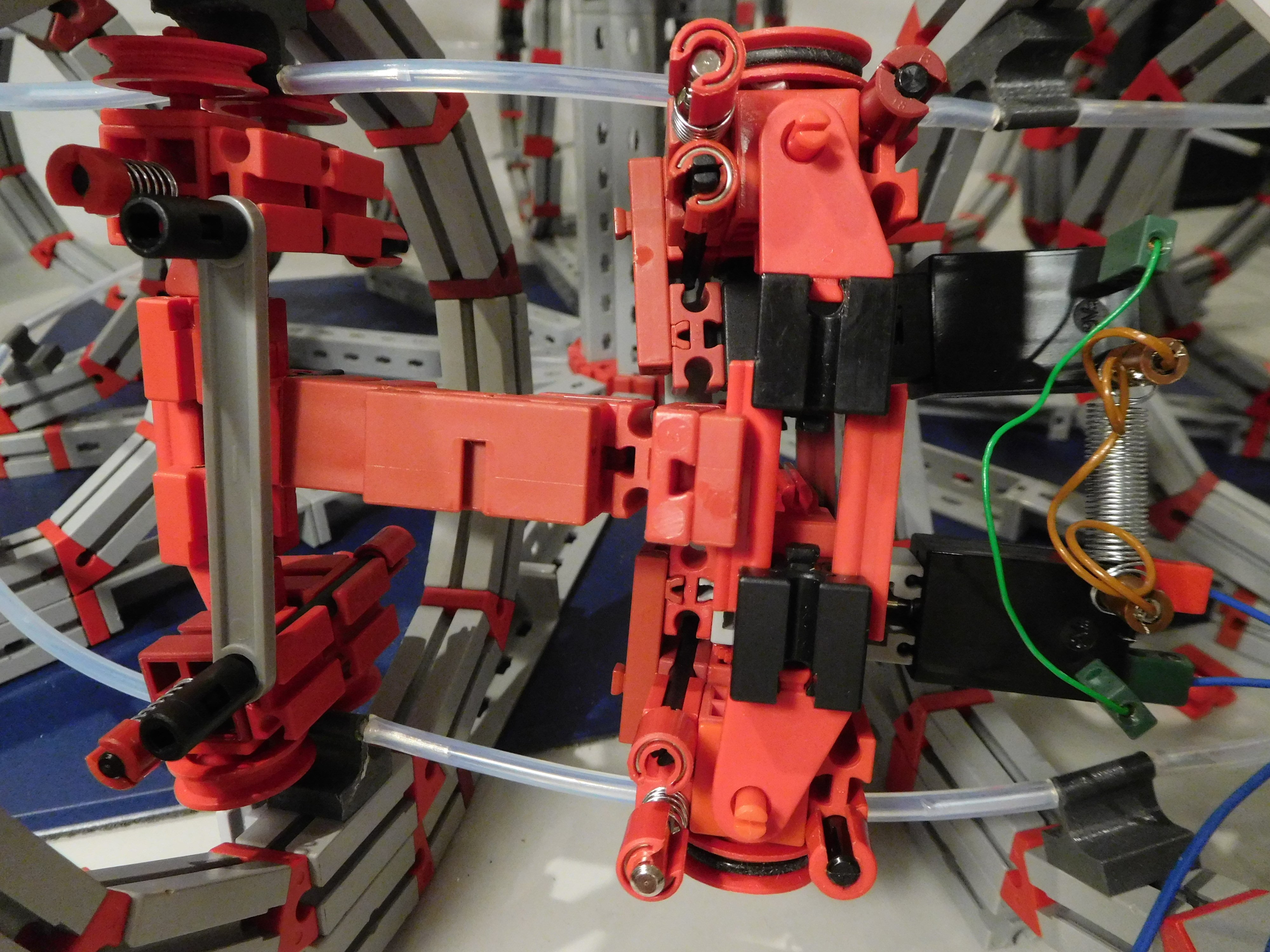
- Dual_Motor_PAra_Dublett_ASL_3.JPG (1.53 MiB) 8146 mal betrachtet
Die Schraubenfeder dient dazu, den jeweils unten liegenden Motor etwas hoch zu ziehen.
Dieses Gefährt wurde ohne Gegenzahnräder am Antriebs-Dublett realisiert und treibt nur an einer Rolle. Es funktioniert, dreht aber durch, wenn das Gefährt vertikal steht (Räder oben und unten). Vermutlich kommt das auch durch die Ungenauigkeit der Bahn und den glatten Teflon-Schläuchen zu Stande.
Als nächstes ein Gefährt, das die zwei Motoren diagonal angeordnet hat (einer schiebt, der andere zieht). Dadurch, dass man nicht zwei Motoren hat, die sich in die Quere kommen, kann man jetzt auch wieder Zahnräder für die Antriebs-Dubletten einsetzen, die die klemmenden Antriebsräder gegensinnig antreiben:
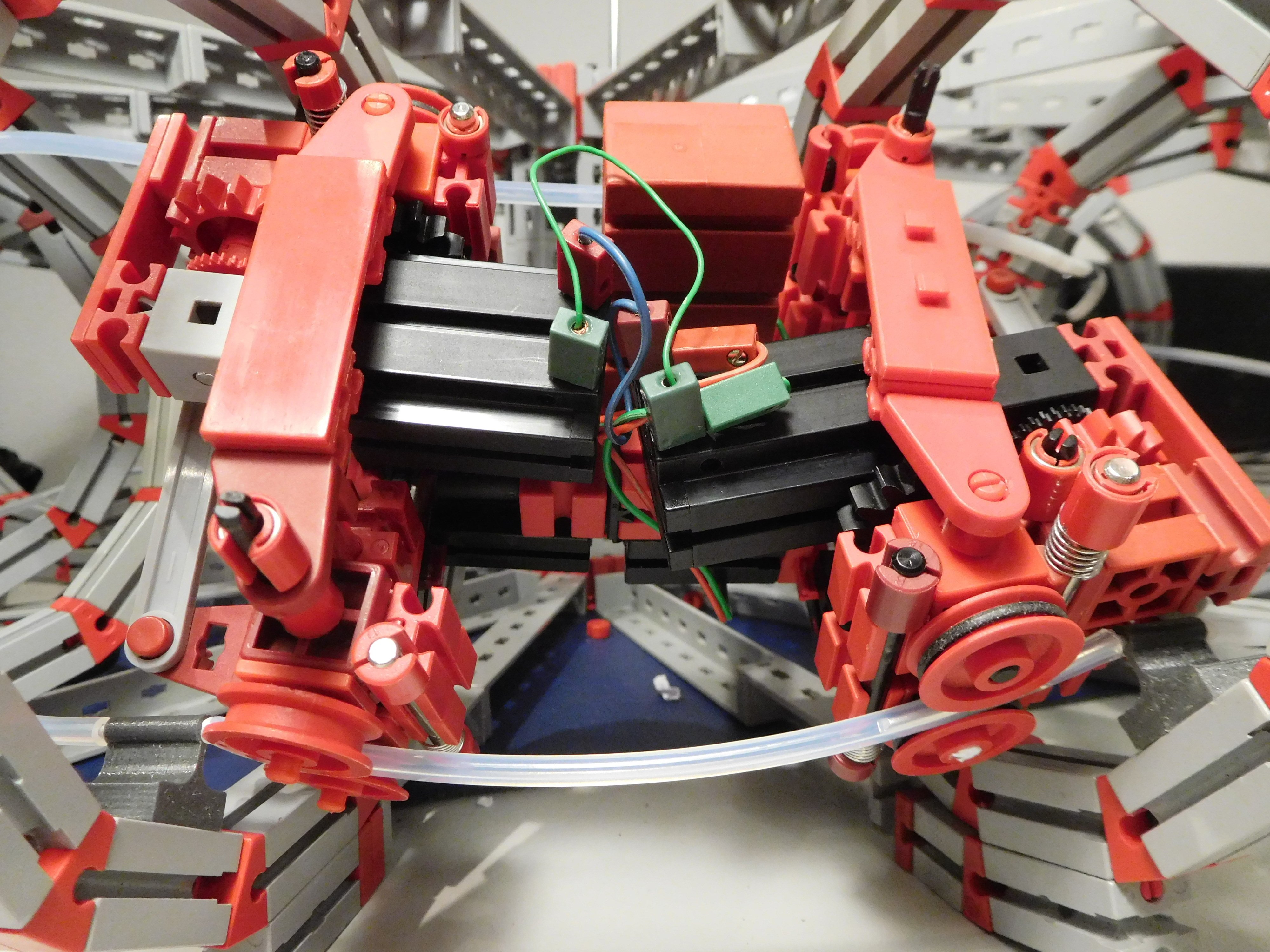
- Dual_Motor_Diag_Dublett_ASL-Z.JPG (1.52 MiB) 8146 mal betrachtet
Das voergestellte Modell arbeitet einigermaßen zuverlässig und kann auch mit Mini-Motoren angetrieben werden.
Als "Krönung" kommt die motorisierte Version eines bereits vormals vorgestellten Fahrgestells mit vier Rad-Quadrupeln, von denen an den Diagonalen jeweils ein XM-Motor sitzt.
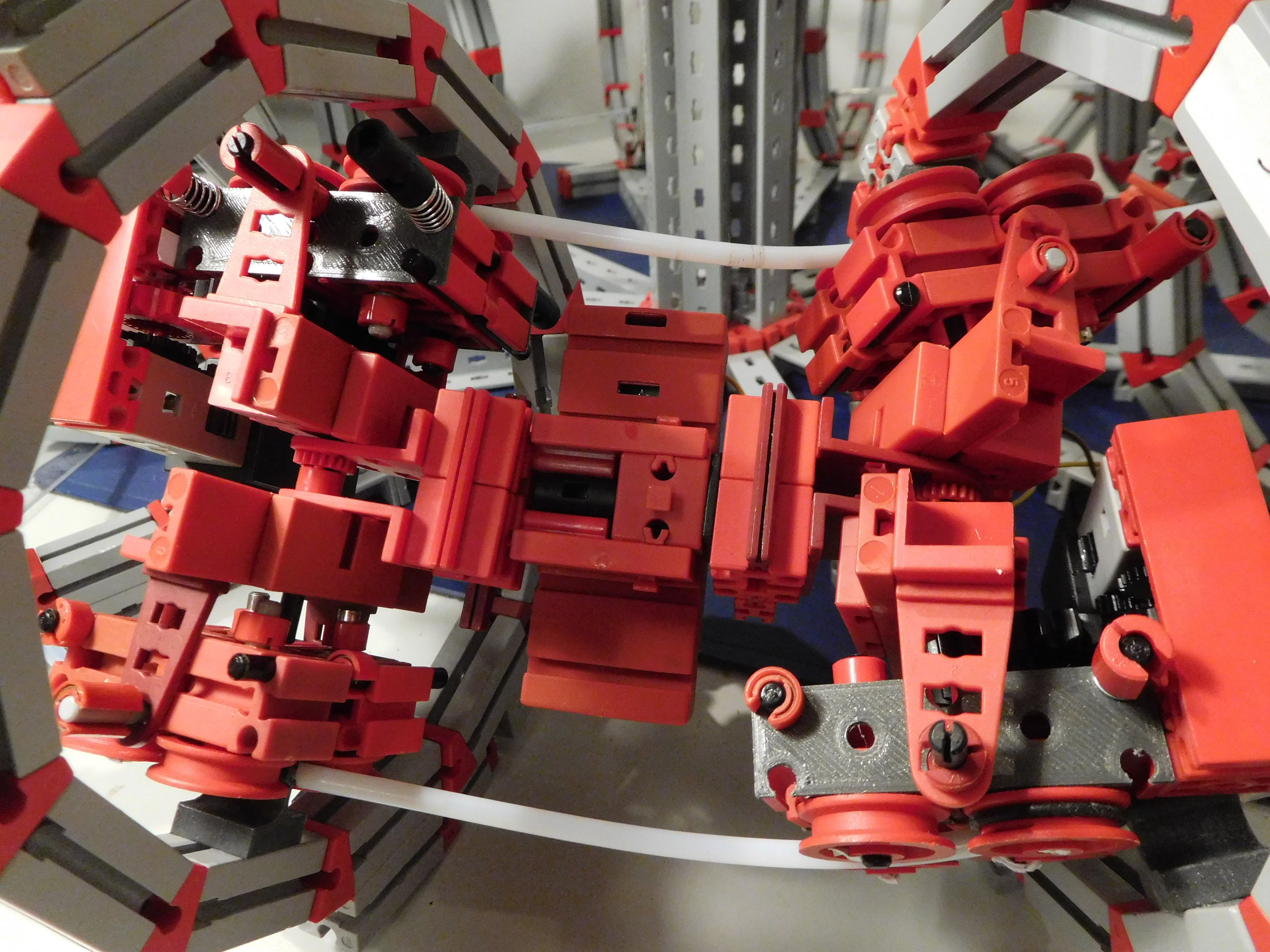
- Dual_Motor_Diag_Quad_ASL-Z.JPG (1.55 MiB) 8146 mal betrachtet
Besonders knifflig waren die Rad-Gruppen-Aufhängungen, die man einerseits dicht an das Mittelteil klemmen muss und man keinen 15-er Lochstein dafür nehmen kann, da sonst die Achsklemmung den Rad-Paketen in die Quere kommt. (Die asymmetrische Aufhängung war nur ein Zwischenschritt, den ich wieder rausgenommen habe). Dann waren noch Lochplatten (grau) nötig, die das Verschieben der 15-er Lochsteine und der 7.5-er Steine verhindern, da die Klemmkraft der Federn, die die Räder auf die Schienen klemmen recht hoch ist. (Die sind hier 3D gedruckt. Man könnte sie aber auch aus einem dünnen Kunststoff-Plättchen oder gar Pappkarton herstellen)
- RAH.JPG (1.18 MiB) 8146 mal betrachtet
Ich bin mir sicher, dass es noch weitere Möglichkeiten gibt. Vielleicht habt Ihr weitere Ideen.
EDIT: Ich könnte mir vorstellen, dass auch das funktioniert: eine starre Hinterachse mit zwei leistungsfähigen Motoren (ohne Achsschenkel-Lenkung) und Achsschenkellenkung an der Vorderachse und Regelung der Motoren in Abhängigkeit vom Lenk-Einschlag der Vorderachse (elektronisches Differential).
