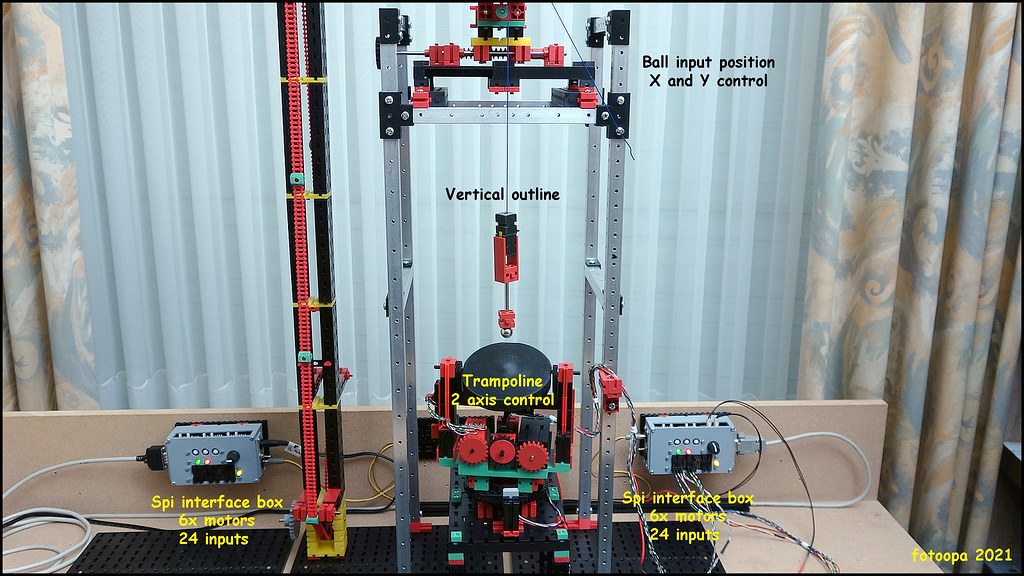
Each drive is done with an XM motor and includes a quadrature encoder. A home point is also provided. For the encoder disks I use neodym magnets D2x3mm and hall detector chips. The encoder disc contains 8 magnets which results in 32 pulses per revolution. The basic rotary table contains a 58-tooth gear and worm reduction. A full revolution has 32x58= 1856 pulses. The upper trampoline table is rotated with a T80 gear segment and is also driven with an XM motor and worm reduction. This gives 32x80=2560 pulses per tour.
A few pictures:

HD on Flickr: https://www.flickr.com/photos/fotoopa_hs/51595797719

HD on Flickr: https://www.flickr.com/photos/fotoopa_hs/51595797549

HD on Flickr: https://www.flickr.com/photos/fotoopa_hs/51595797034
[url=https://flic.kr/p/2mBiFfJ]

HD on Flickr: https://www.flickr.com/photos/fotoopa_hs/51595354218/in

HD on Flickr: https://www.flickr.com/photos/fotoopa_hs/51594317477
Instead of the trampoline, a mirror can also be inserted. This is then very suitable for experiments with light beams.
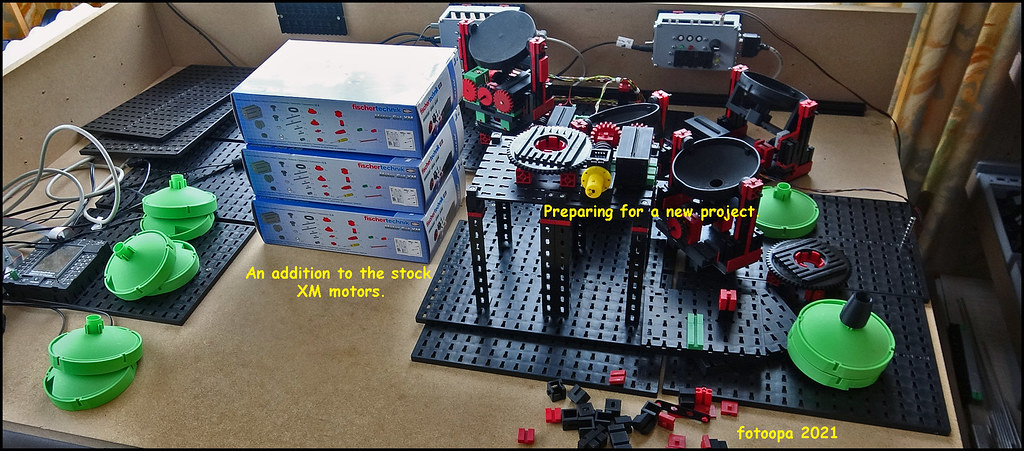
An extra stock of XM motors was needed for this.
HD on Flickr: https://www.flickr.com/photos/fotoopa_hs/51595132776
I am now in the process of preparing all the modules. This requires a lot of work. The 8 XM motors with quadrature decoders and home pulse all need to be connected. I am using my DE0-nano-soc module for this purpose. This module is linked via an I2C connection to the TXT controller. The Robopro software program is used to control everything. The motors are controlled with the TB6612 modules on the SPI bus. In total I can connect 12 motors together with all their fast encoder signals.
Within a few weeks I hope to be able to provide images of the results with you. The idea is to jump from one trampoline to another. At the end they have to come in a green funnel to bring them up again. The order how the balls jump is set with the motors. Whether it goes for double or triple salto I have to wait and see. The next step will then be tests with lights and the mirrors.
Frans.