Hallo...
Ok, es juckte zu sehr in den Fingern

Ich hab mal den Baubot von fischer etwas größer und als Funktionsmodell nachgebau. Eigentlich ist es schon das dritte mal.
In meinem Nachbau stecken:
Lampen (da kommen noch einige dazu)
2x Akkus
4x ft-TX Controller
14 Motoren (bislang)
und jede Menge fischertechnik-Teile.
Ich hab mal Fotos gemacht nun vom Umbau von Version 2 auf 3.
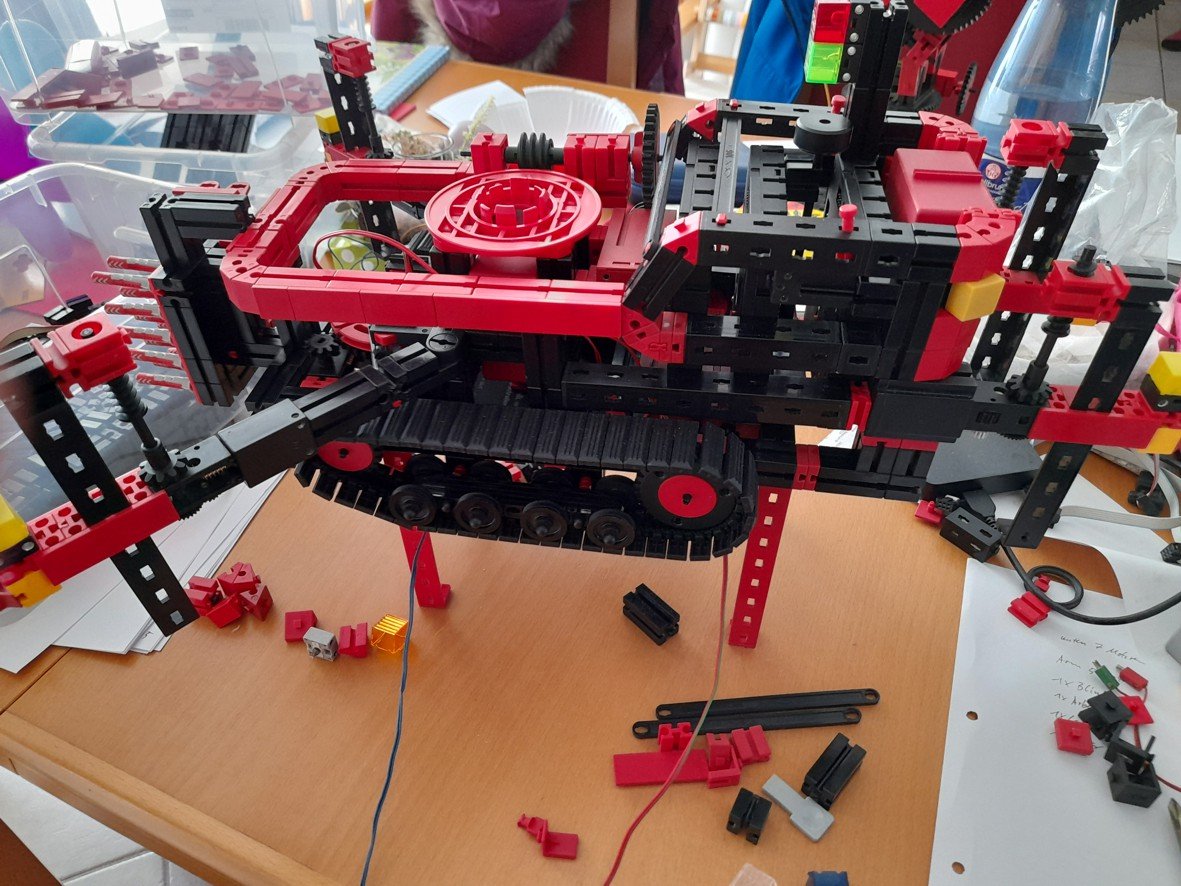
- Baurobot 1.jpg (243.08 KiB) 6207 mal betrachtet
Hier sieht man den Unterbau. Selbst die vorderen Stützen kann man ausfahren und dann absenken.
Kleiner Gag. Auch wie beim Original hat man zwei Not-Aus im oberen rechten Teil.
Wie beim kleinen Bruder sind die Dübel im Magazin vorne angebracht.
3 TX sind hintereinander im rechten Teil zu sehen. Der 4. ist von unten zugänglich in der Mitte.

- Baurobot 2.jpg (237.96 KiB) 6207 mal betrachtet
Hinter dem Dübel-Magazin kann man eine Bohrerablage erkennen. Die hat bei der Version 2 noch keine Funktion.
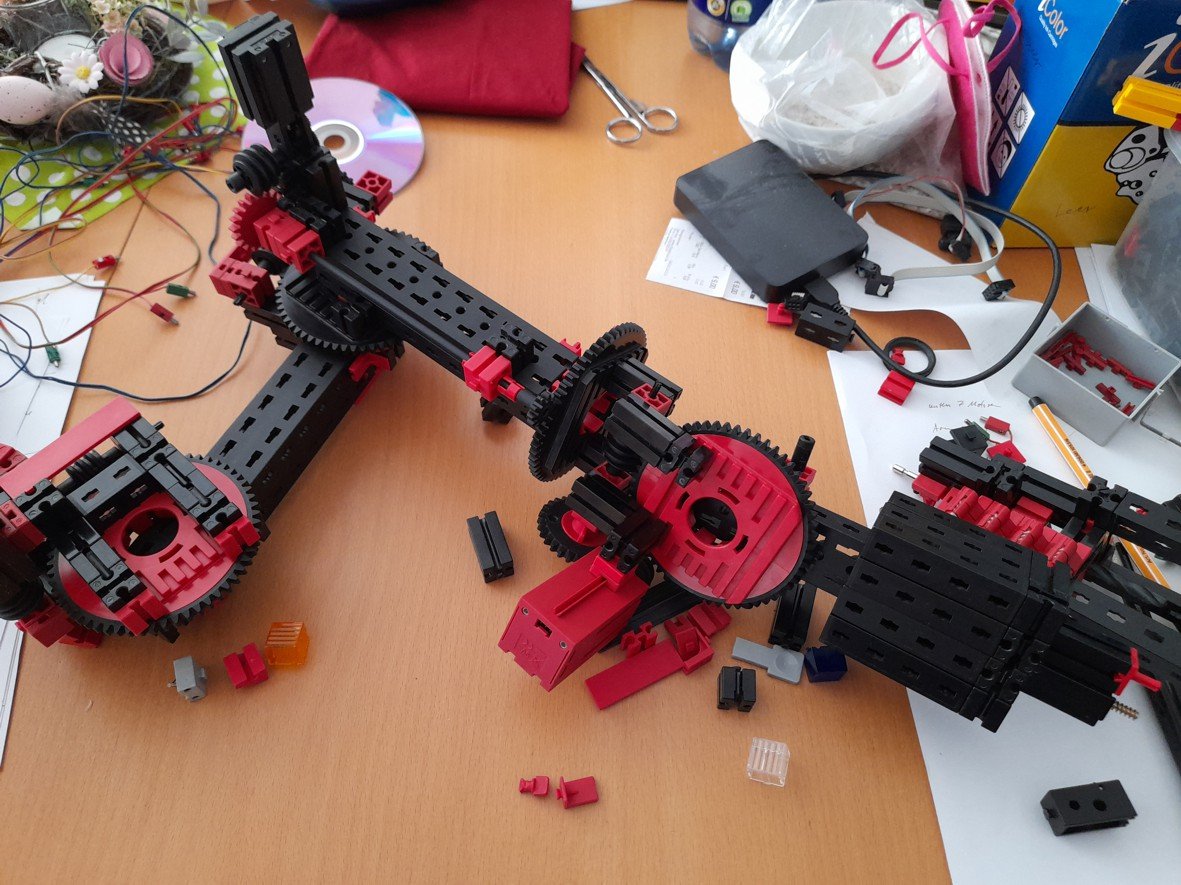
- Baurobot 3.jpg (232 KiB) 6207 mal betrachtet
Der Roboterarm in 2. Version. Hier ist der Bohrer als Minimot-Schnecke zu sehen.
Die Antriebe sind jeweils über zwei Schnecken an einer Drehscheibe.
Ich hab hier verschiedenes Ausprobiert.
Minimot
Powermot
XM
Codermotoren
Alle gehen mit dem Z30. Beim Minimot ist es aber besser Z40 zu nehmen.
Zusätzlich kann man den Arm über einen Minimot in der Mitte drehen.
Es sind im unteren Teil, 2x 150er Statikträder übereinander gebaut.
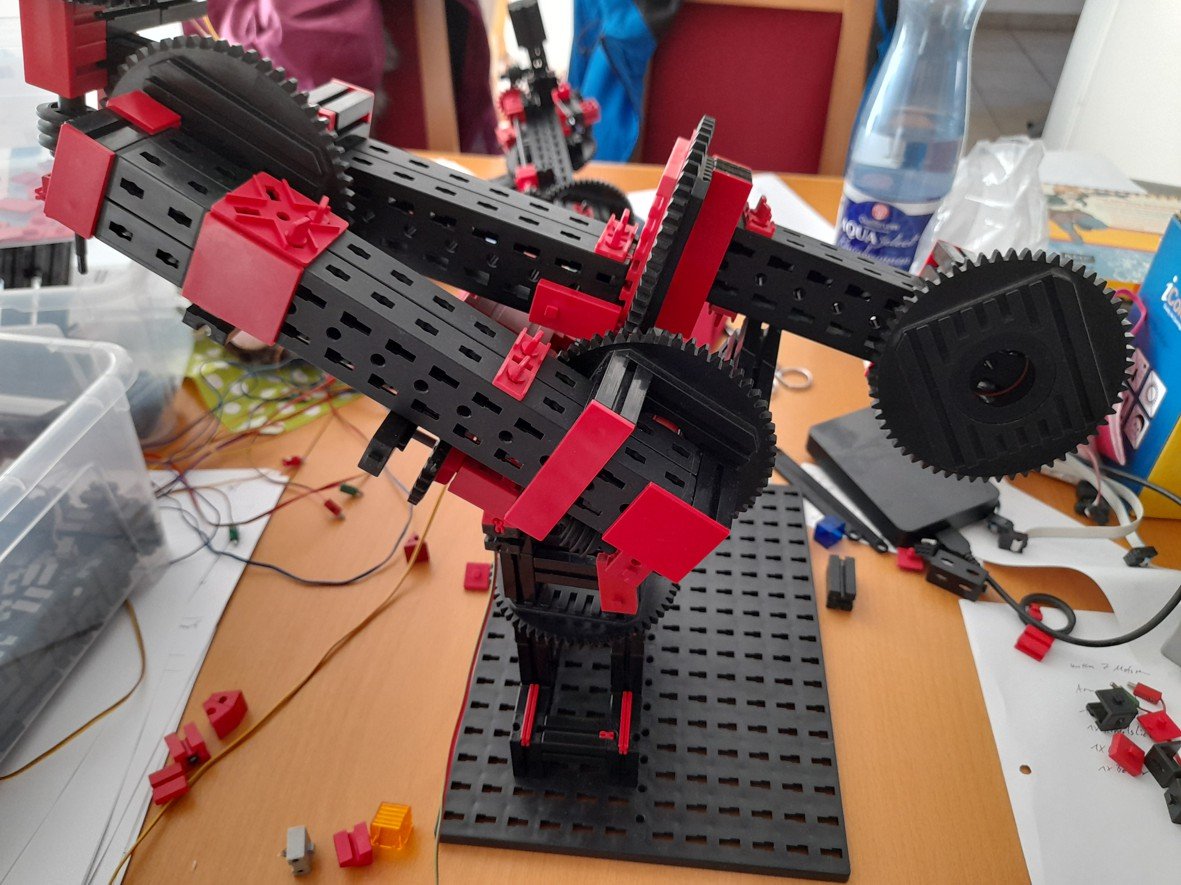
- Baurobot 5.jpg (208.79 KiB) 6207 mal betrachtet
Ich hab dann aber den Roboterarm neu entwickelt. Bei Version 2 muss noch die Verwindung durch Laschen verhindert werden.
Im Grunde sind es zwei Modelle, denn der Arm an sich ist ein voll funktionierender Roboterarm und halt der Raupenantrieb.
Alleine der Roboterarm mach schon eine Menge her, da er sehr kompakt ist.
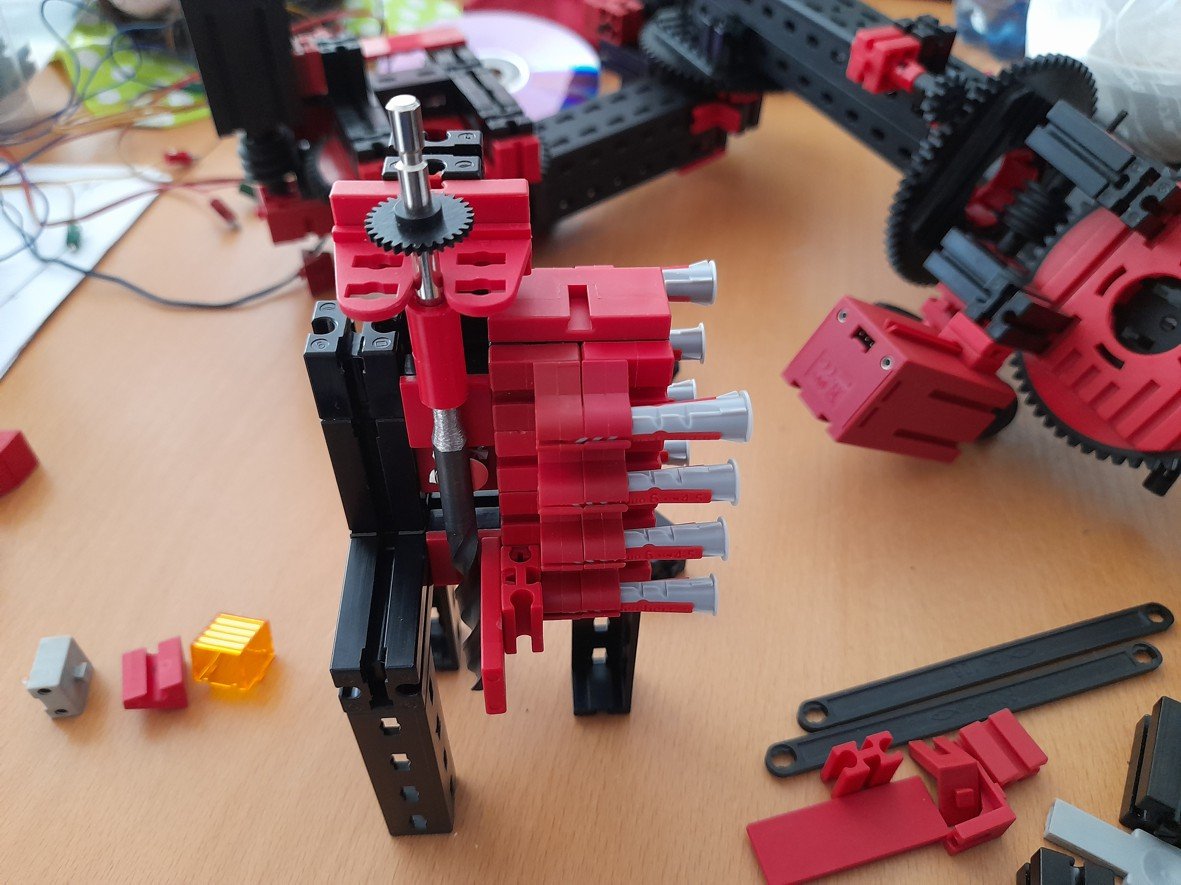
- Baurobot 4.jpg (174.85 KiB) 6207 mal betrachtet
Ich bin dann hingegangen und hab das Dübelmagazin neu entwickelt. Nun funktioniert es wirklich. Der Roboterarm kann aus dem Magazin Dübel entnehmen. Aber der Arm kann ja nicht bohren. - Jetzt schon. Ich hab einen 6mm Bohrer hinten auf 4mm runtergeschliffen und in einen Achsverbinder gesteckt. Oben ist vom Minimotgetriebe eine Metallachse. Das dumme ist nur, der Bohrer ist zu lang.
Nun kann ich aber den Bohrer ausklinken und hab den roten Pin frei, kann den Dübel damit nehmen und in das Bohrloch stecken.
Nun für die nächste Bohrung den Bohrer wieder aufnehmen ist, sagen wir mal sportlich. Es ist ein 4mm Loch, mit 4mm Achse, da ist kein Spiel und so genau ist der Antrieb nun auch nicht - aber - könnte schon, ab und an. Egal...
Hinter dem Bohrer, kann man einen Magneten sehen. Der hat aber keine direkte Verbindung zum Bohrer. Daher kann man den gegriffenen Bohrer zur Seite weg bewegen und das nächste Loch bohren.
Erst hatte ich gedacht, ich bocke den Baubot hoch und stelle die TX darunter. Ich hab nun alles -in- das Modell bekommen. Dafür ist er etwas länger geworden.
Im Grunde könnte man den sogar, wie beim Original, mit dem Handy steuern. Der kann eben auch über die zwei Akkus laufen, da meist nur so zwei Motoren gleichzeitig laufen. Ansonsten halt über Netzteile und USB-Kabel.
Ich hatte vor, die rote und weiße Verkleidung, mit Kunststoffplatten nachzubauen. Dann kann man aber nicht mehr hinein schauen.
Schade, dass es die passenden Teile nicht in weiß gibt. Ich hatte dann vor die mit durchsichtigem Plexiglas zu verkleiden. Ich finde aber, im original ft Look sieht es besser aus.
Nun möchte ich noch ein Video drehen. Welche Programme sind denn so bei euch im EInsatz? Ich würde gerne mal mit einem Green Sreen arbeiten. Ein Storryboard hätte ich schon. Ich wollte den dann in Styropor bohren lassen
Zurück zum Baubot Modell. Wie ich finde, ist es ein richtig gut gelungenes Modell geworden. Auch vom Aufwand her, braucht es sich nicht hinter den Industriemodellen zu verstecken. Auf den ersten Blick sieht es wie ein "normales" ft-Modell aus, doch es stecken jede Menge Details drin, wo ich richtig stolz darauf bin, das es "richtig" funktioniert - ist halt eben fischertechnik.
Mit freundlichen Grüßen
fishfriend
Holger Howey