ich habe ein wenig mit kapazitiven Berührungssensoren und elektrisch leitendem Filament experimentiert, weil ich den Gedanken von Bedienelementen reizvoll fand, die sich als Oberfläche am Modell oder sogar im Baustein selbst unterbringen lassen.
Das hier ist dabei heraus gekommen: https://www.youtube.com/watch?v=iABhU9tCzkg
Das Messprinzip ist z.B. hier ganz gut beschrieben. Für Controller-Anwendungen gibt es mindestens vier Möglichkeiten:
(1) Software-Messroutine auf dem µC, für den Arduino z.B. per CapacitiveSensor Library mit externer Widerstand oder, raffiniert ganz ohne externe Beschaltung , ADCTouch Library für AVRs.
(2) Touch sensor IC mit digitalem Ausgangssignal, z.B. TP223 für einen einzelnen Kontakt, fertig zu haben in verschiedenen Boards mit in der Platine integrierter Sensorfläche.
(3) Touch sensor IC für mehrere Kontakte, z.B. MPR121 für 12 Kontakte mit I2C-Interface.
(4) Touch-pins bestimmter Mikrokontroller, z.B. touch0 bis touch9 beim ESP32.
Ansatz (1) klappt wunderbar, ist aber als Software-Lösung wg. des notwendigen Pollings bzw. Interrupts etwas einschränkend.
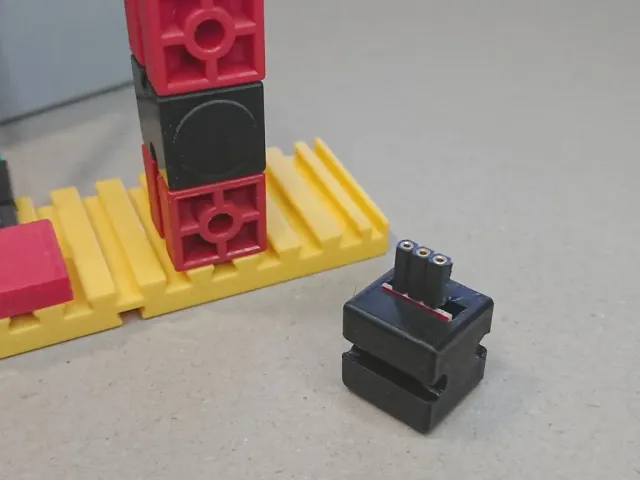
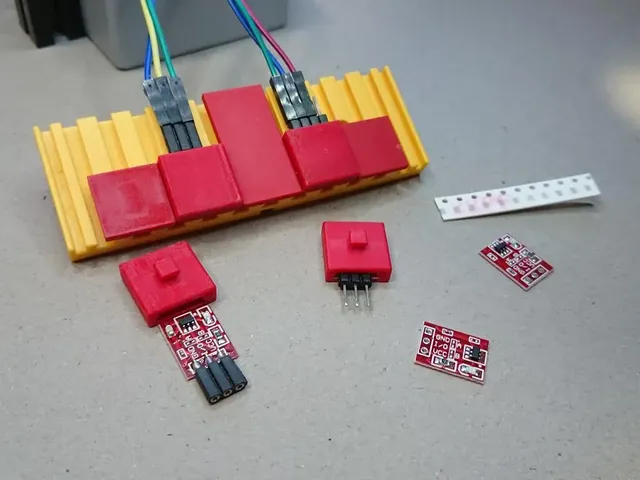
Für Ansatz (2) habe ich diese kleinen roten Boards bestellt und ein kleines Gehäuse mit BS5-Formfaktor gemacht. Klappt wunderbar, löst allerdings selbst mit Gehäuse schon lange vor der Berührung aus. Die Empfindlichkeit lässt sich per Nachrüstung eines SMD-Kondensators einstellen, hier waren 22pF passend, da ich einen Berührungs- und keinen Näherungssensor wollte. Zapft man Pin 3 des ICs an, kann man auch einen beliebigen externen Kontakt anschließen (s.u.). Etwas nervig die sehr helle onboard-LED, die man aber natürlich auch entfernen kann.
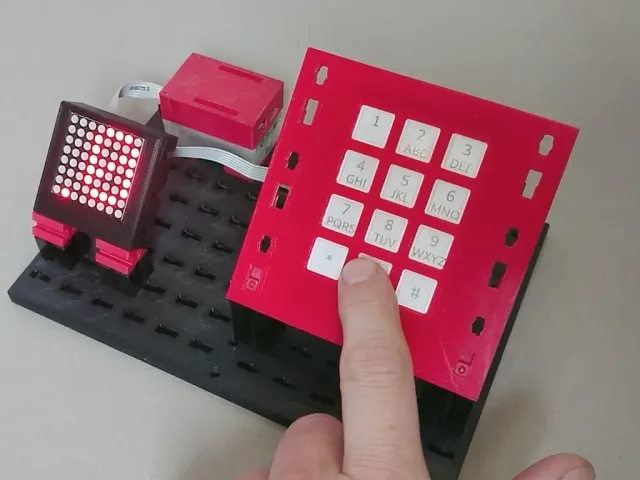
Ansätze (3) und (4) sind vergleichbar. Vorteil hier, dass man große Kontrolle über das Messverfahren hat, die Empfindlichkeit also per Software einstellen kann, und natürlich die große Anzahl von Kontakten, mit denen man dann auch leicht Bedienfelder realisieren könnte.
Als Kontaktflächen kommen ft-Metallteile, Klebealufolie, leitfähige Tinte etc. in Frage. Außer bei ft-Teilen ist der einfache Anschluss allerdings heikel. Mit leitfähigem Filament dagegen kann man direkt Buchsen für ft- oder andere Stecker in den Sensor integrieren. Hier ein paar Umsetzungsideen.

Da die Sensoren auch auf andere leitfähige Gegenstände reagieren, könnte man sie z.B. ähnlich wie Hall-Sensoren als berührungslose Referenz-/Endlagenschalter einsetzen, die nicht per Magnet sondern einfach von einer Metallachse ausgelöst werden, aber auch anfälliger gegen irrtümliches Auslösen wären.
Es gibt noch eine Reihe weiterer Ansätz für Berührungs- und Näherungssensoren, ein Überblick z.B. hier, ich habe mich hier aber mal auf den kapazitiven beschränkt.
vg
Jan
https://www.printables.com/model/180417 ... hertechnik
https://www.printables.com/model/180416 ... hertechnik
oder
https://www.thingiverse.com/thing:5370845
https://www.thingiverse.com/thing:5370866