Seite 1 von 2
Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 06 Mai 2026, 20:37
von atzensepp
Ein Feuerwerk von Ideen in diesem Video:
https://www.youtube.com/watch?v=MgQbPdiuUTw
- Paralleler Manipulator für 3D-Positionierung (3R3T)
- Kugelgelenkstangen mit Gummiband-Fixierung
- Hochgenauer linearer magnetischer Positionsgeber
- Superfein-Stepping von Schrittmotoren
Die Idee mit den Kugelgelenken könnte man (vielleicht etwas grober

) für Fischertechnik anwenden.
Und das mit dem Positionsgeber wäre auch ein Versuch Wert
Auch faszinierend:
https://www.youtube.com/watch?v=-mgqq0qdDRM
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 07 Mai 2026, 21:34
von juh
Danke für den Hinweis, Florian. Das ist ein wirklich ziemlich beeindruckend und interessant, v.a. der Positionsgeber ist veradmmt clever.
vg
Jan
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 11 Mai 2026, 22:30
von atzensepp
Das mit dem Positionsgeber musste ich gleich ausprobieren.
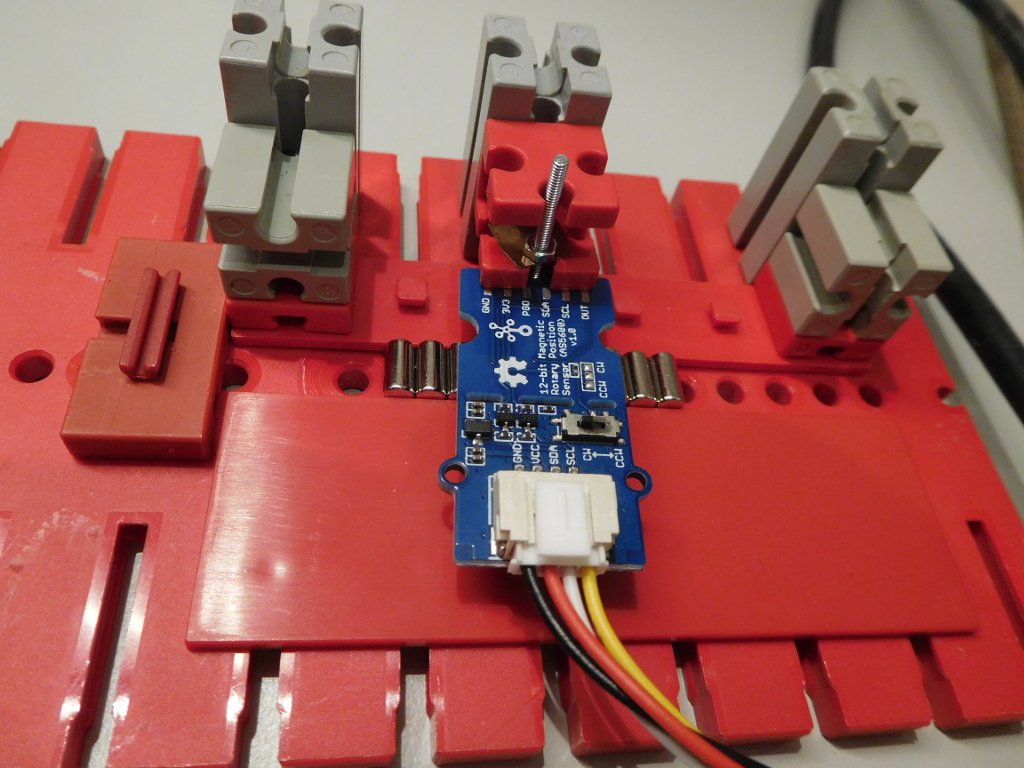
- LMag.JPG (125.85 KiB) 5969 mal betrachtet
Mit der Arduino-Library von Rob Tillart kann man die kumulative Position auslesen:
https://github.com/RobTillaart/AS5600
Damit bekomme ich 16200 Counts auf 30mm, was schon eine ziemlich gute Auflösung von 1.8um wäre. Die Messungen an den Endpositionen sind reproduzierbar.
Allerdings ist die Abhängigkeit nicht ganz linear. Hängt vermutlich vom Abstand der Magnete zum Sensor ab.
Grüße
Florian
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 12 Mai 2026, 10:45
von Harald
"Ziemlich gut"? --- Also neee, 1,8 µm ist ja nun wirklich mal sowas von grobschlächtig 11!elf1!!!.
Willst du Atomkerne angucken, Röntgen-Lithographie betreiben oder mit nem Interferometer in irgendein Sternenbild schauen? Für meine ft-Bauerei wäre das mehr als genug.
Die Nichtlinearität könnte herrühren von:
- Streuung der Eigenschaften der Magnete (mechanische Abmessungen, Positionen/Abstände, Feldstärke). Die sind verchromt, vielleicht gibt es da ähnliche Differenzen wie wir sie von den ft-Stahlachsen her kennen.
- Phased-Array-Mathematik: Das Gesamtfeld ist das Produkt aus Einzelstrahler-Charakteristik (hier: Magnet) und Gruppen-Charakteristik (hier: ein Rechteck-Fenster). Letztere fällt nach außen hin ab. Mit zusätzlichen Magneten außen dran sollte das besser werden.
Gruß,
Harald
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 12 Mai 2026, 23:55
von atzensepp
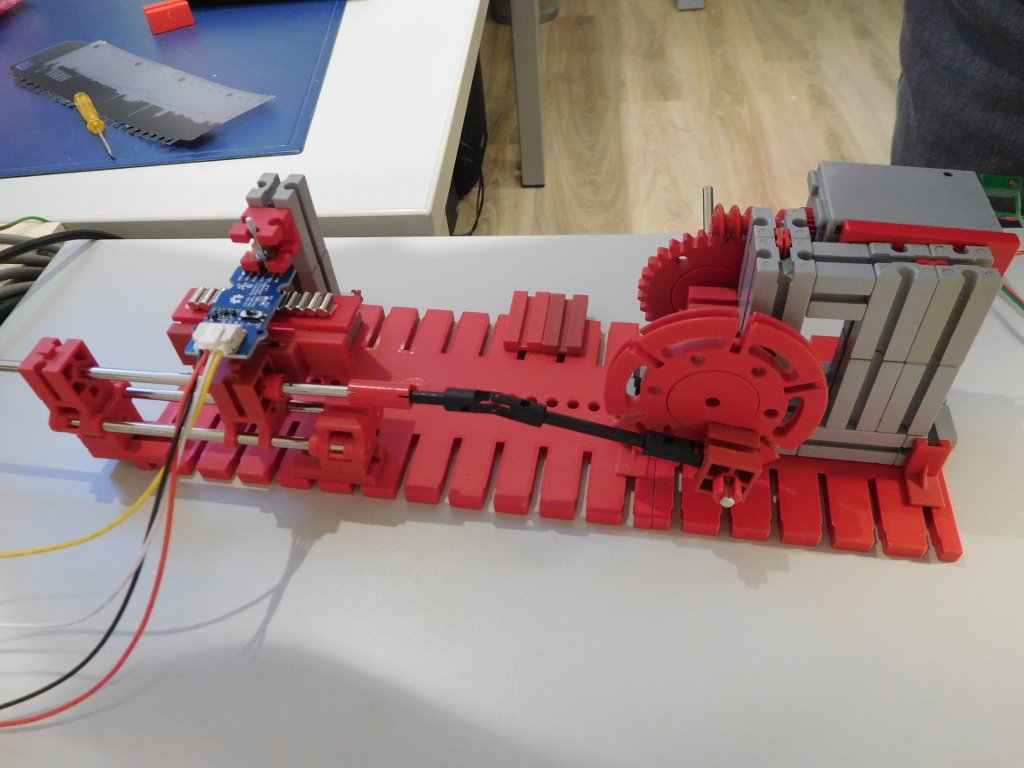
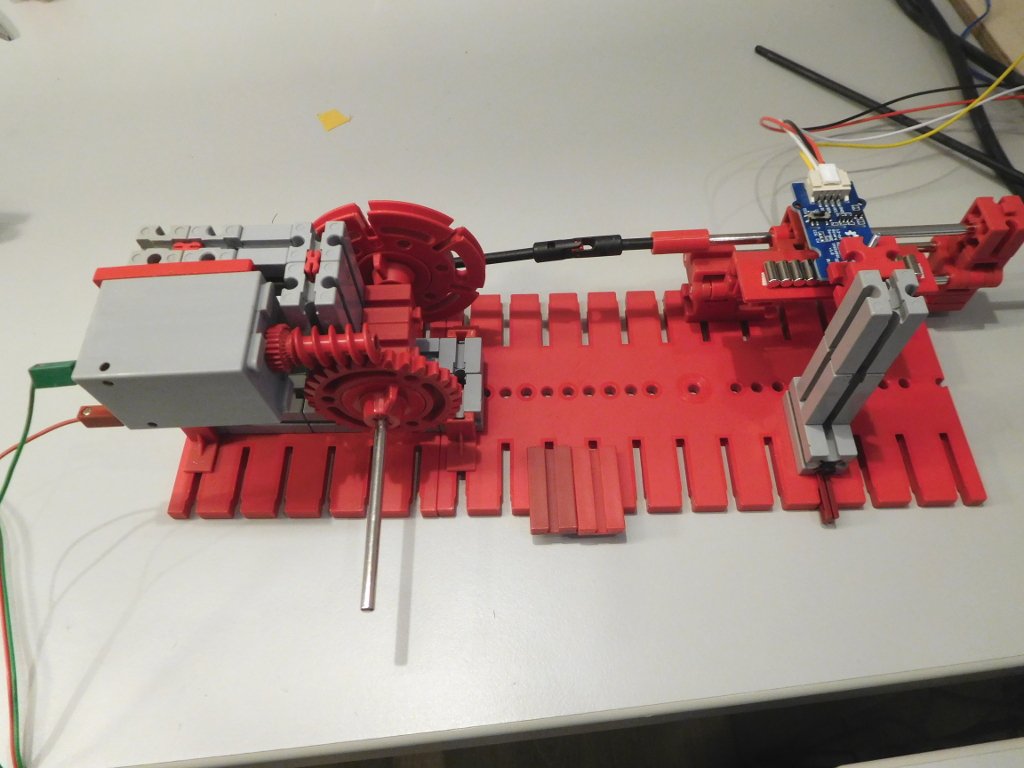
Für die Justage des Magnetsensors ein Aufbau mit einer oszillierenden Linearbewegung:
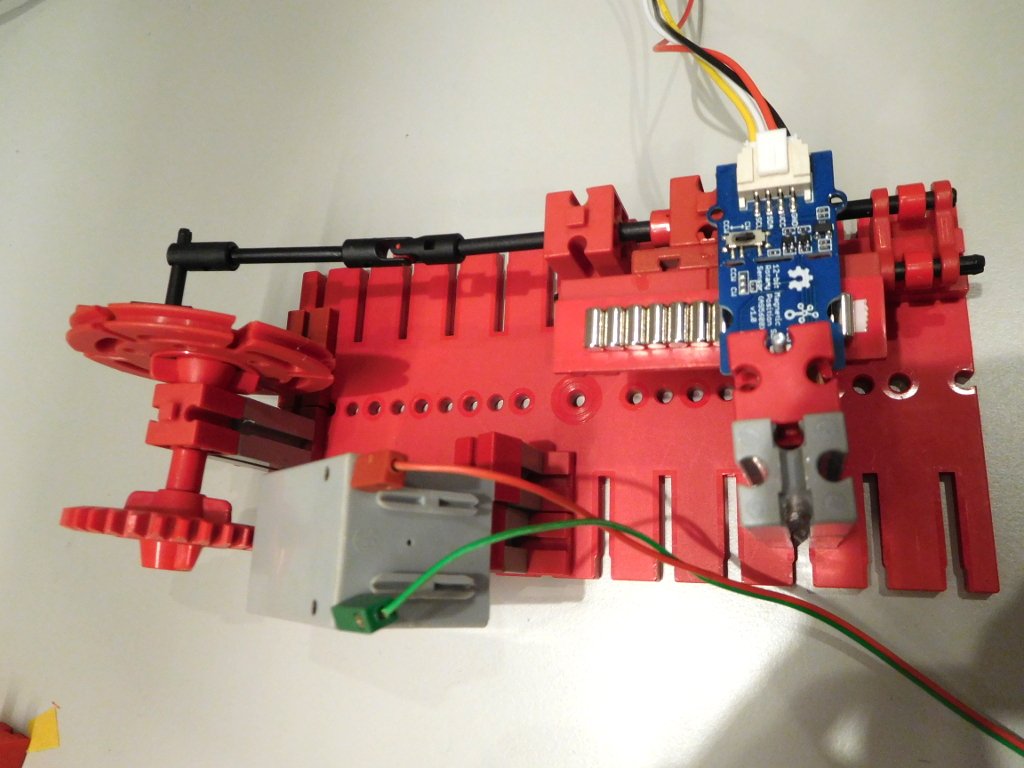
- LMag2.JPG (112.81 KiB) 5763 mal betrachtet
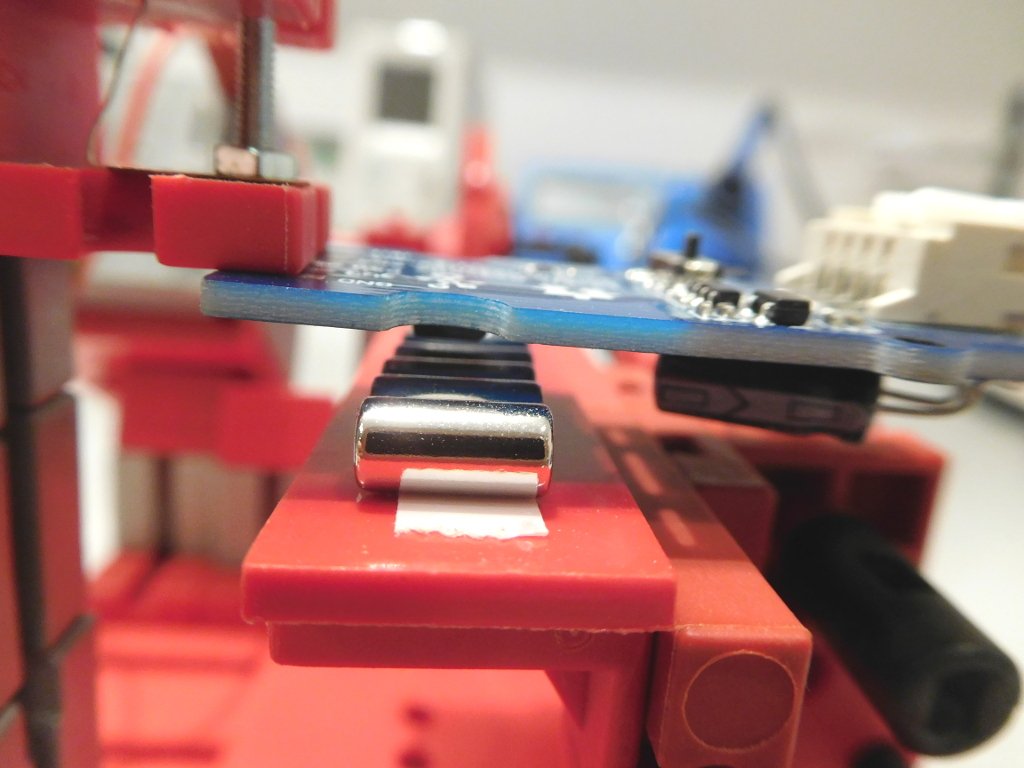
- LMag3.JPG (96.1 KiB) 5763 mal betrachtet
Die Kurve wurde so eingestellt, dass die "Treppen" weitgehend verschwunden sind:
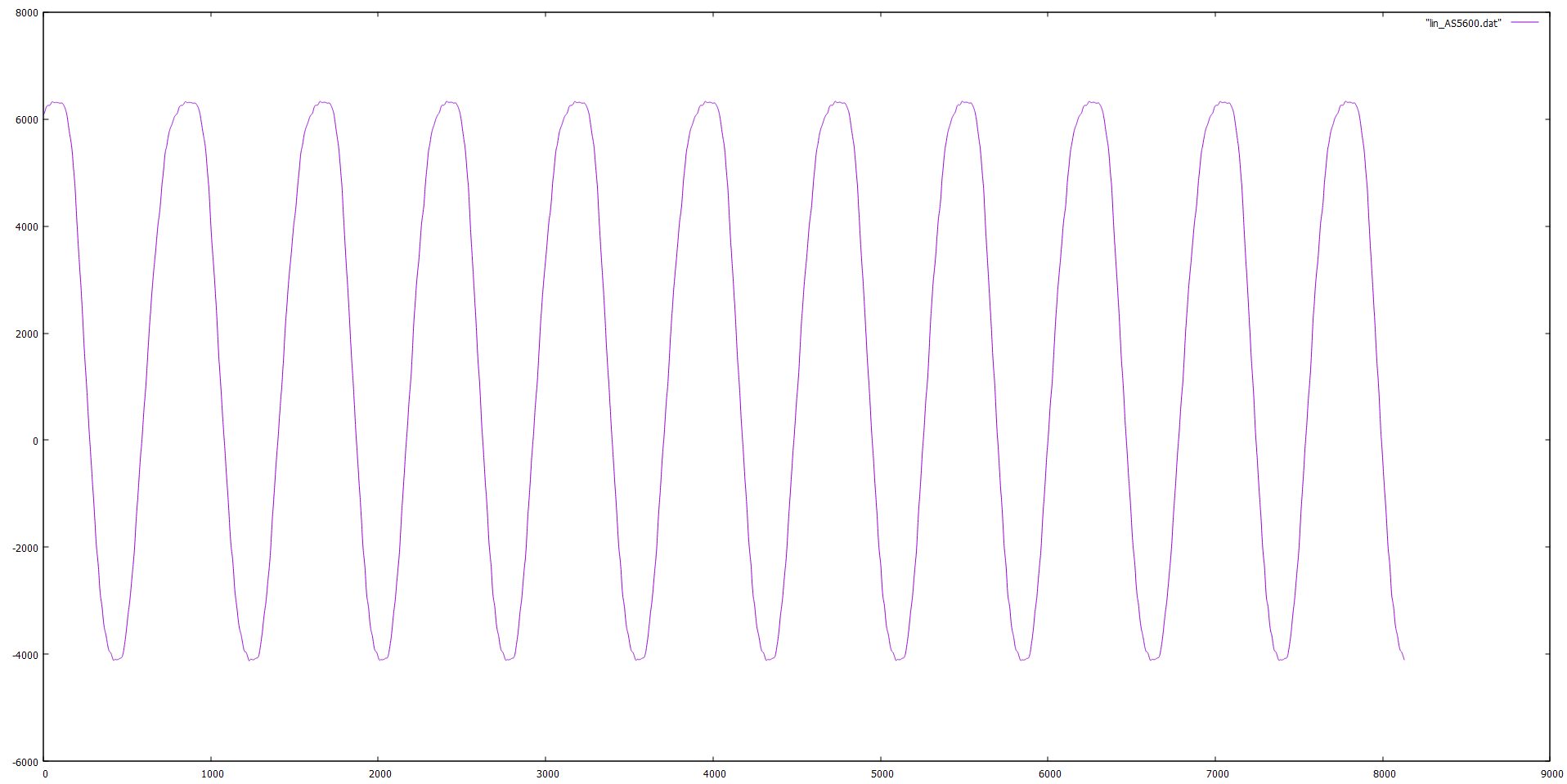
- lin_AS5600.png (215.04 KiB) 5763 mal betrachtet
Auf jeden Fall sieht man, dass der Sensor nicht "wegläuft" und die Umkehrpositionen gut reproduziert werden.
Denke, damit kann man was machen.
Da die Bewegung nicht ganz gleichförmig ist, sind die Extrema nicht symmetrisch. (Oben ist es breiter, weil da die Umkehrung etwas länger braucht als unten)
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 13 Mai 2026, 07:43
von Cymbaline
Hallo,
Sieht gut aus!
Wird diesen Fehler nicht behoben wenn du das Gleitlager auf der gleichen Höhe stellst als die Achse von der Drehscheibe?
Grüße,
Wilbert
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 13 Mai 2026, 22:34
von atzensepp
Hallo Wilbert,
tatsächlich wird der Asymmetrie-Effekt deutlich geringer, wenn man Achse auf Höhe des Gleitlagers setzt.
Weitere Verbesserung: Metallachse am Antriebsrad und Metallachse für Kurbelzapfen.
Ganz habe ich es allerdings noch nicht wegbekommen. immerhin ist das Motorgeräusch jetzt gleichmäßig.
Grüße
Florian
EDIT: PS: Mit einem doppelten verwindungssteifen Lager und glatten Kunststoffachsen klappts dann auch noch etwas besser:
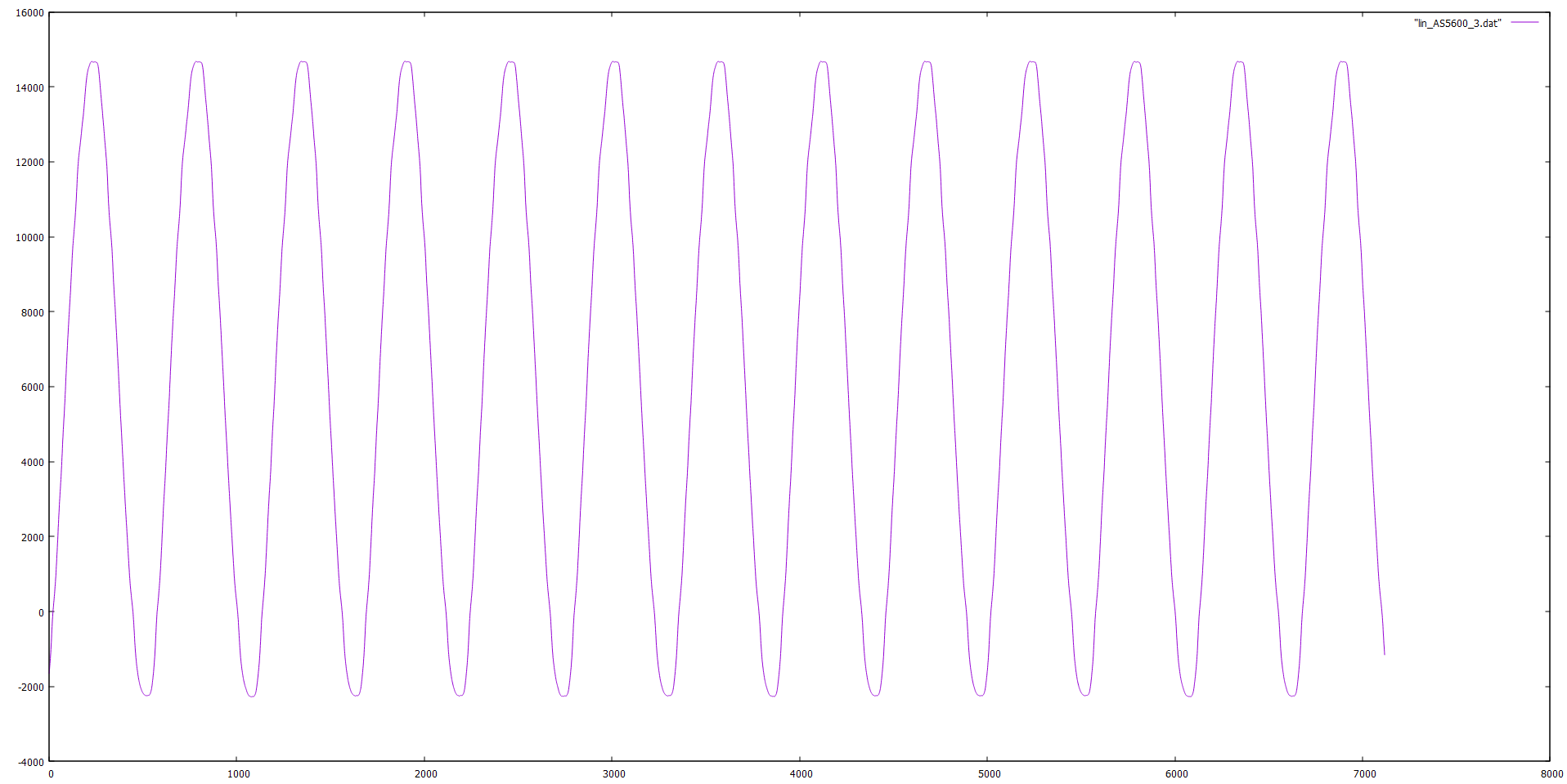
- lin_AS5600_3.png (263.62 KiB) 5501 mal betrachtet
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 14 Mai 2026, 14:02
von atzensepp
Eine saubere Oszillationsbewegung hinzubekommen ist gar nicht so einfach.
Immer verkeilt sich etwas, die Drehscheibe eiert oder die Führungsachsen sind verbogen, was dann zu einem lokal erhöhten Gleitwiderstand führt.
Dieser Aufbau ist jetzt halbwegs brauchbar:
- LMag4.JPG (108.9 KiB) 5495 mal betrachtet
- LMag5.JPG (102 KiB) 5495 mal betrachtet
Um den Magnetsensor zu positionieren, beobachte ich am Arduino-Plotter das Signal und justiere den Sensor, bis ich im Sinus-Signal keine "Treppen" mehr sehe.
- LMag6.JPG (1.13 MiB) 5495 mal betrachtet
Im Prinzip funktioniert es also. Allerdings habe ich noch keine Idee, wie man die Positionierung in einem Modell hinbekommt.
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 14 Mai 2026, 22:04
von geometer
Hallo Florian,
erstklassig, was Du da wieder präsentierst!
Beim Drücken verkantet immer mehr als beim Ziehen. Wenn Du die Pleulstange eliminierst, indem Du mit einem umgelenkten Gewicht an der einen Seite Deines Trägers ziehst und Deinen Träger auf der anderen Seite mit einem nicht elastischen Seil mit dem exzentrischen Pin auf Deiner Drehscheibe verbindest (Zwirn aus 100% Leinen oder Ramie oder Dacron backing, nicht das fischertechnik-Nylonseil!), würde das vermutlich schon viele Verkeilungsprobleme beseitigen.
Viele Grüße
Thomas
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 14 Mai 2026, 23:11
von atzensepp
Hallo Thomas,
vielen Dank für Dein Lob und den Tipp! Den muss ich mal ausprobieren. Da spaltet sich eine eigene interessante Problemstellung ab: wie man möglichst gleichförmige Bewegungen erzeugen kann.
Ich habe mal mit einem Verschiebetisch die Werte aufgenommen.
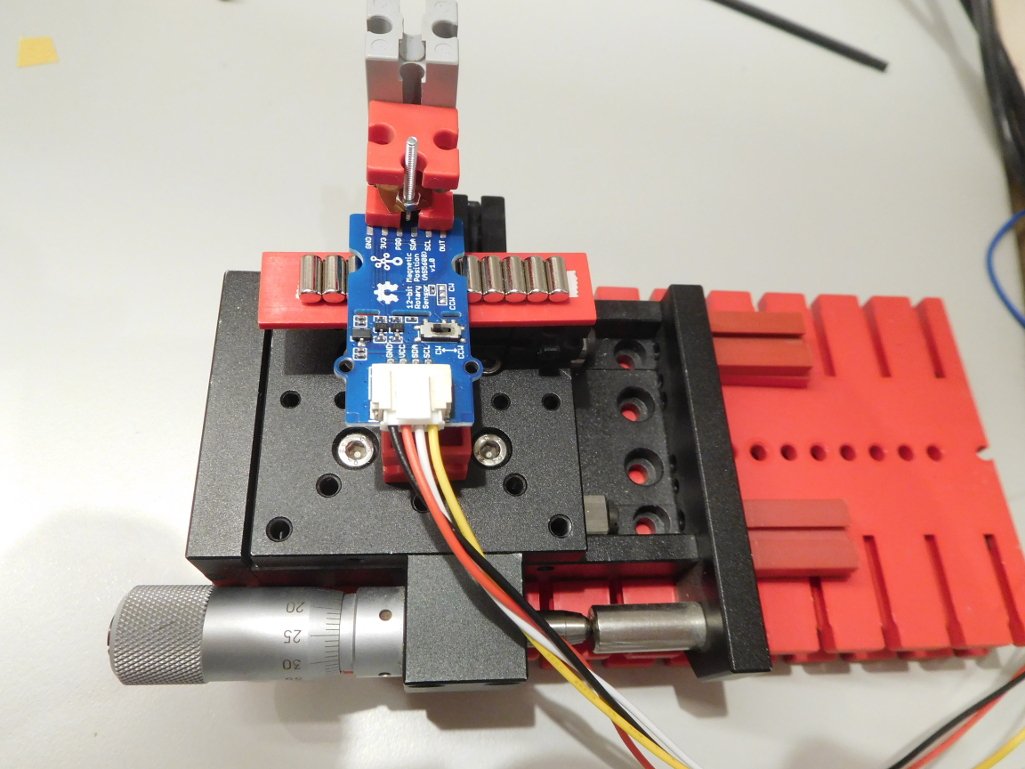
- LMag7.JPG (119.63 KiB) 5392 mal betrachtet
Die Reproduzierbarkeit ist sehr gut. Werte wurden in beiden Richtungen aufgenommen. Die Kurven decken sich praktisch bis auf 10 counts.
Was natürlich nicht schön ist - und das haben wir bereits mit dem oszillierenden Teil gesehen - ist, dass die Kurve nicht linear ist.
Man kann das durch geeignete Justage des Sensors sicher optimieren, aber nicht ganz wegbekommen. Und immer Eichkurven aufnehmen, ist oft auch nicht praktikabel. Vielleicht kann man ein Justagetool (Lehre) drucken, mit dem man den optimalen Abstand Sensor-Mangete - wenn man ihn dann mal gefunden hat - leicht reproduzieren kann.
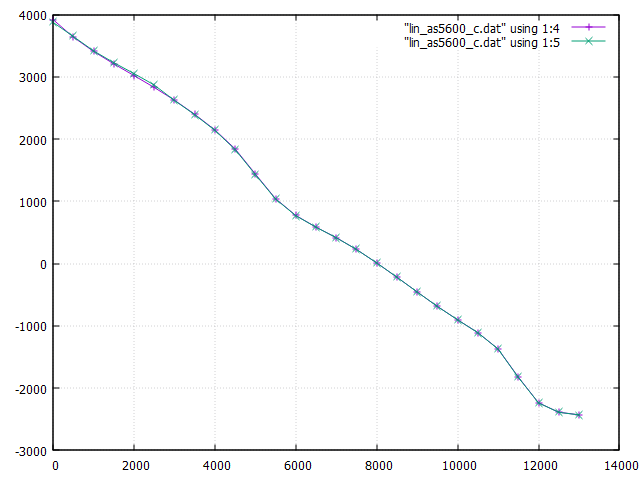
- Magnetencoder-Counts vs. Verschiebeweg in um
- lin_AS5600_c.png (28.16 KiB) 5392 mal betrachtet
Grüße
Florian
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 17 Mai 2026, 20:37
von atzensepp
Der optimale Abstand ist nicht zentral über den Magneten, sondern seitlich versetzt:
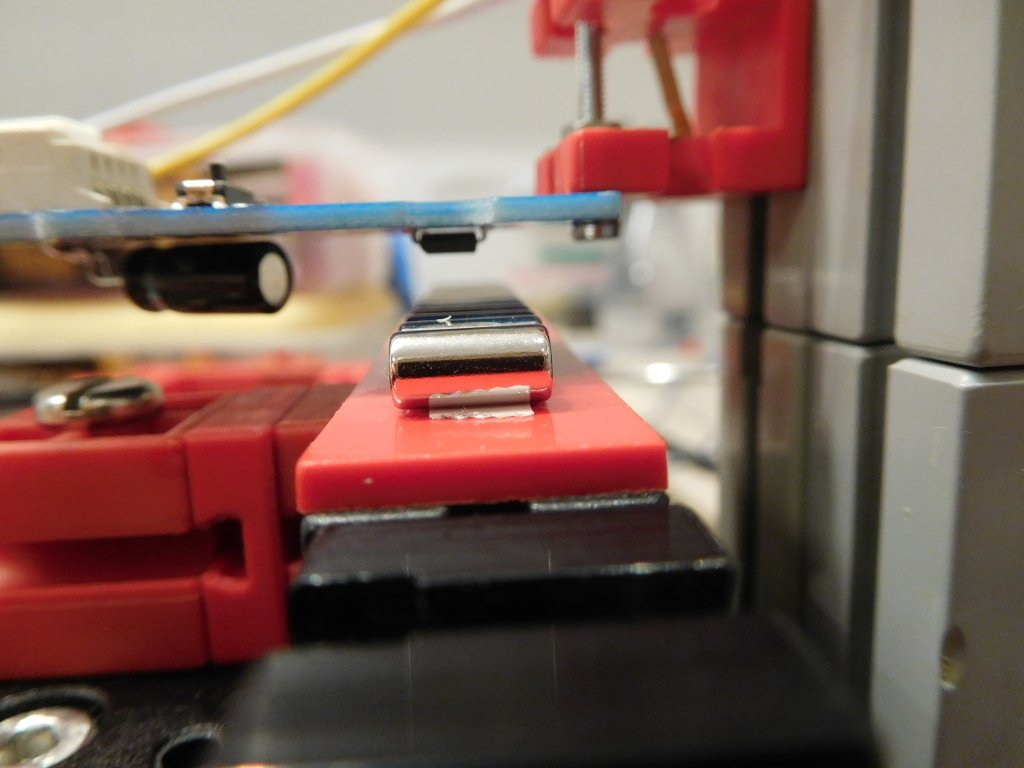
- lin_AS5600_C71.JPG (90.27 KiB) 5188 mal betrachtet
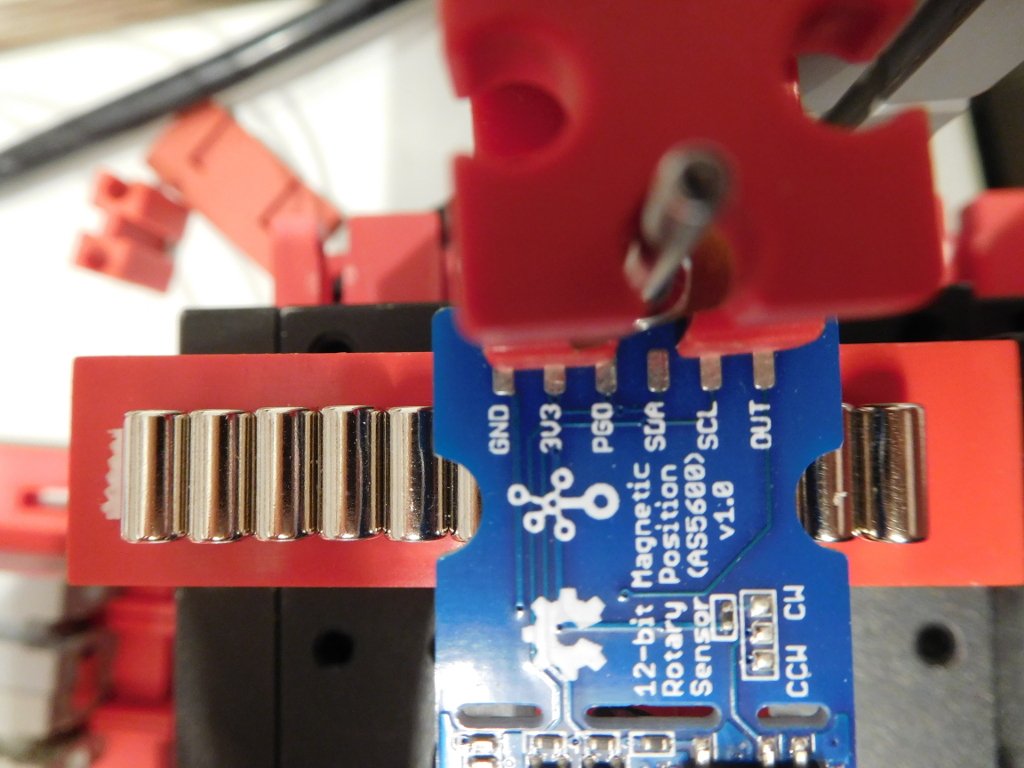
- lin_AS5600_C72.JPG (119.2 KiB) 5188 mal betrachtet
Die Hubbel sind nicht ganz weg zu bekommen.
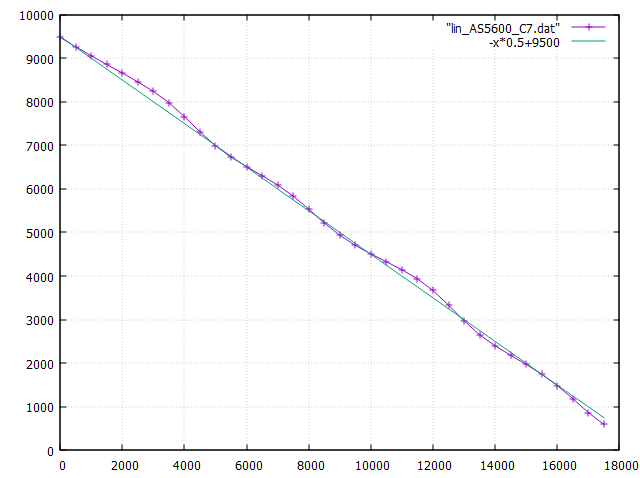
- lin_AS5600_C7.png (30.91 KiB) 5188 mal betrachtet
Man beachte, die Steigung von -0.5. Diese ist zu erwarten, weil der Sensor für eine "Umdrehung" (Drehung des Magnetfelds) 4096 Impulse liefert und die Magneten einen Durchmesser von 4mm haben. Da die Magneten antiparallel angeordnet, wird eine volle Umdrehung des Magnetfelds nach 2 Magneten also 8mm erreicht. Manchmal ist die Steigung auch 0.5. Ich glaube, es hängt davon ab, auf welcher Seite sich der Sensor befindet.
Wenn einen die Hubbel stören (ohne Korrektur ist der Fehler ~ 0.1 mm) , kann man eine Eichkurve aufnehmen. Um dann im Zielmodell die richtige Position für den Sensor zu finden eine Justierhilfe, die auf der einen Seite das AS5600-Board (Grove AS5600) und auf der anderen Seite das Manget-Array aufnimmt:
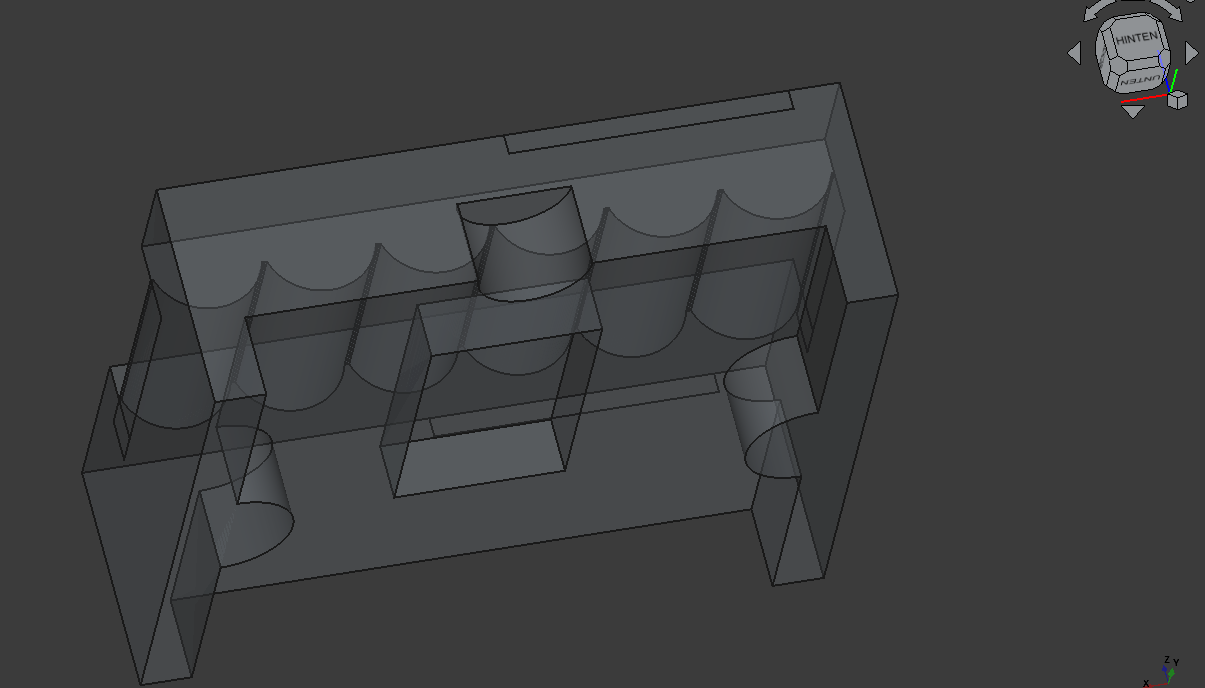
- JustierhilfePNG.PNG (97.82 KiB) 5188 mal betrachtet
Es kann auch sein, dass die Magnete nicht gleich stark sind und daher die Hubbel kommen. Aber vermutlich sieht das Magnetfeld halt so aus.
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 30 Mai 2026, 00:23
von atzensepp
Nachdem ich mir eine Reihe von halbwegs günstigen 4mm Zylindermagneten besorgt habe, gibts nun ein paar ft-kompatible Halterungen der Länge 32 und 60mm, die kaskadiert werden können. Das linke Teil erfordert noch Teppicklebeband. Beim rechten Teil klemmen die Magnete in einem Halteschacht.
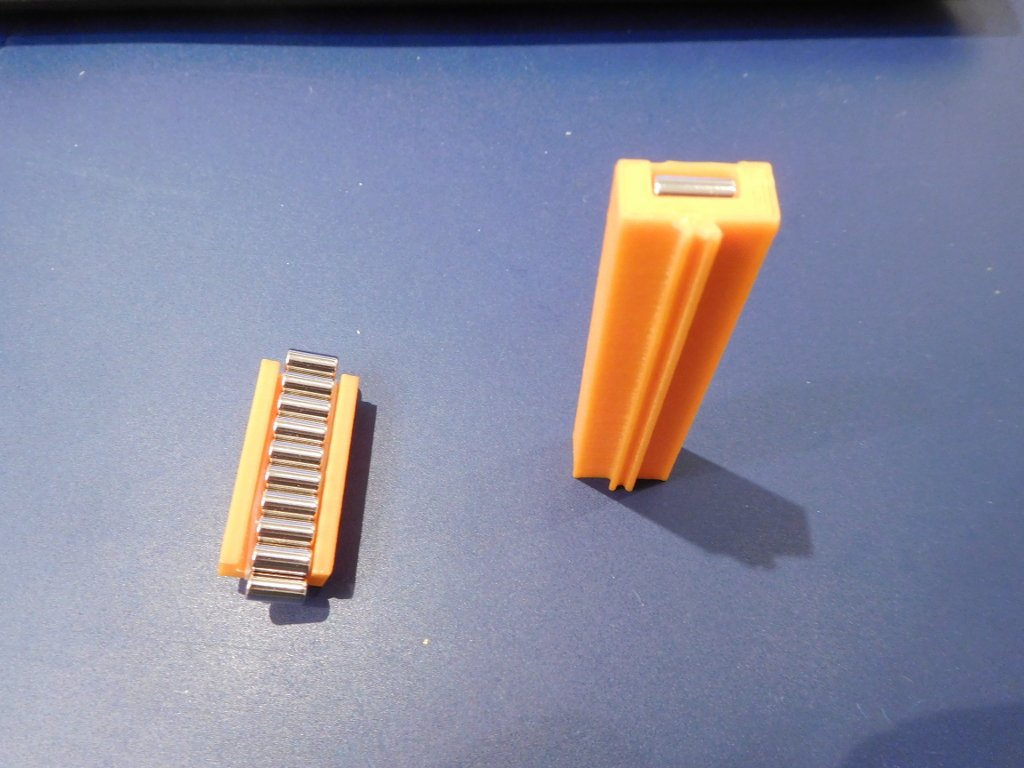
- Magnetarray.JPG (114.58 KiB) 4024 mal betrachtet
Habe eine Positionsregelung mit Ardhuino-PID auf 5 Counts genau (rechnerisch 10um) realisiert. Müsste man jetzt noch durch eine unabhängige Messung validieren. Und die Verbiegungen der Fischertechnikteile sind vermutlich auch noch ein Thema.
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 03 Jun 2026, 00:14
von atzensepp
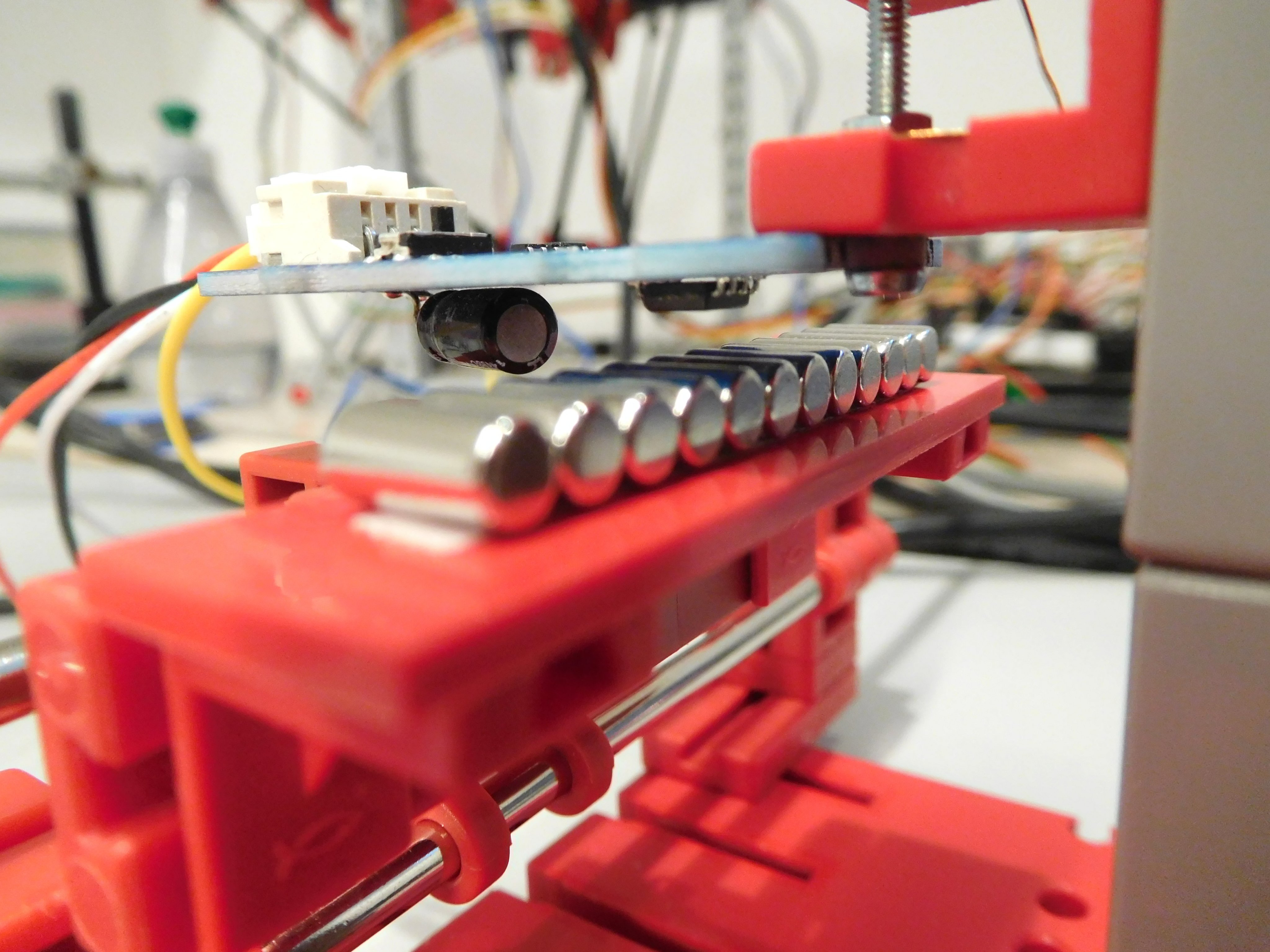
Die Längenmessung kann für eine Flexure-Linear-Verschiebe-Einheit verwendet werden. Im beweglichen Shuttle ist an der Unterseite ein Stapel von Zylindermagneten verborgen. Auf der Grundplatte in passendem Abstand der AS5600-Sensor.
[attachment=1]Modflex1.JPG[/attachment]
[attachment=0]Modflex3.JPG[/attachment]
Mit einer billigen M3-Schraube kann man dann die Positionen wiederholgenau einstellen. Zur Eichung kann eine Mikrometerschraube eingesteckt werden. Die Nullposition ist die Ruhestellung des Flexures. Nachdem man die Eichkurve aufgenommen hat, kann die Mirkometerschraube durch das "Driver-Barrel" (Zylinder, der 2 M3-Muttern enthält) mit der M3-Schraube ersetzt werden.
Wenn ich z.B. die Weißlichtposition in einem Michelson-Interferometer gefunden habe, merke ich mir den Zahlenwert des Magnetsensors und kann die Position dann auch nach großer Verstellung wieder finden. Ich kann damit auch verifizieren, ob sich das Shuttle nach einer gewissen Zeit verschiebt.
1 mm sind etwa 500 Counts, was eigentlich für Interferometrie im sichbaren Bereich noch etwas grob ist. Wie genau das wirklich ist, hängt natürlich von den Fertigungstoleranzen der Magneten und ihrer Chrom-Beschichtung ab. In dem Originalbeitrag wurden chinesische Rotations-Sensoren mit 21-Bit Auflösung verwendet. Das wäre natürlich schon interessant.
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 03 Jun 2026, 17:57
von juh
Florian auf dem Weg zum ersten ft-Elektronenmikroskop mit Nanopositionierungssystem und wir sind live dabei.
Der Wahnsinn mal wieder.
lg
Jan
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 04 Jun 2026, 16:21
von atzensepp
Hallo Jan,
Elektronenmikroskop wird das nicht. Aber ich bin auf dem Weg, um Verstellungen im Bereich von optischen Wellenlängen zu realisieren. Endlich mal, was schon lange auf meiner ToDo-Liste war: Verstellung mit Voice-Coil. Längenmessung mit dem Magnet-Array und Ansteuerung der Voice-Coil mit PWM, Regelung wieder mit PID:
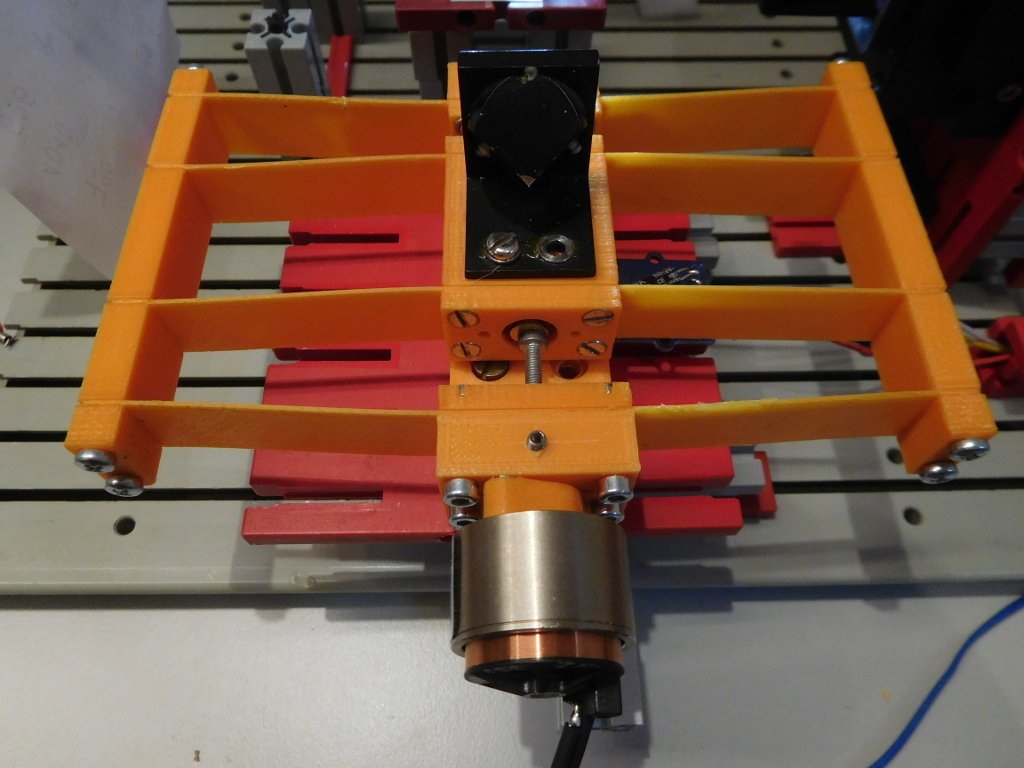
- MM1.JPG (109.26 KiB) 1677 mal betrachtet
Der Drück-Mechanismus ist noch etwas schlampig. Aber im Prinzip funktioniert es schon.
Folgendes Experiment hat geklappt:
1. Baue Mikrometerschraube ein
2. Justiere Interferometer auf Weißlichtposition
3. Merke den Encoder-Wert
4. Baue auf Voice-Coil um
5. Setze Regler auf den ausgelesenen Enocer-Wert
=> Weißlichtposition wird gefunden: Bunte Interferenzmuster erscheinen
Vielleicht ginge es mit Minimotor mit Getriebe, der dann "am Rad dreht". Blöd halt nur, dass sich das Rad axial verschiebt.
Oder klassisch: 2 Muttern auf dem Schlitten und eine lange Gewindestange verwenden. Braucht man halt wieder Kugellager und Befestigungen dafür.
Grüße
Florian
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 04 Jun 2026, 19:27
von fishfriend
Hallo...
Alten 3D Drucker oder Fräse schlachten?
Könte man die unterschiedliche Brechung der Farben an einer Linse "darstellen"? Also mit Farbfilter und dann scharfer Abbildung?
Nur so als Ideen...
Mit freundlichen Grüßen
Holger
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 05 Jun 2026, 13:48
von atzensepp
Hallo Holger,
meinst Du eine chromatisch-konfokale Abstandsmessung, also eine Mess-Methode für Abstandsmessung, bei der die chromatische Aberration von Linsen ausgenutzt wird?
https://www.polytec.com/en/surface-metr ... technology
Tatsächlich eine interessante Inspiration die ich mal ausprobieren könnte.
Was das Ausschlachten eines 3D-Druckers oder einer Fräse anbetrifft: Meinen alten 3D-Drucker (Anycubic i3 MEGA) will ich vorerst nicht ausschlachten, obwohl ich vielleicht mal einen neuen organisieren sollte und eine Fräse habe ich nicht.
Aber prinzipiell ja: sofern vorhanden, könnte man irgendwie nutzen.
Viele Grüße
Florian
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 05 Jun 2026, 14:55
von FiTeN3rd
Hallo Florian,
PRUSA bietet zu all seinen Druckern auch einzelne Einheiten wie etwa Lineareinheiten an, auch nur die Spindeln und zugehörige Schlösser.
Eventuell musst Du einen Drucker (meiner ist ein etwas älterer MK 3S) auswählen und dich zu den Ersatzteilen durchhangeln.
Du findest da auch die Druckdateien für die ganzen anderen (von Prusa massenweise im 3D Druck hergestellten) Einzelteile.
Nur so als Hinweis.
Liebe Grüße aus Braunschweig,
Matthias (fiten3rd)
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 05 Jun 2026, 19:58
von fishfriend
Hallo...
Ja, das meinte ich. Mir viel der Name aber nicht mehr ein.
Von wegen 3D Drucker/Fräse. Es gibt ja auch "defekte" bei kleinanzeigen für wenig Geld. Die könnte man halt ausschlachten.
Ist halt die Fage ob neue Eratzteile bulliger sind.
Ich gebe zu, ich würde auch einfach in ft-Bauteile reinbohren bzw Lager einpressen usw statt ein 3D Druckteil zu machen.
Mit freundlichen Grüßen
Holger
Re: Motorisierter Open-Source-XYZ-Mikromanipulator
Verfasst: 13 Jun 2026, 11:37
von atzensepp
Ich habe jetzt den AS5600 12-Bit Encoder durch einen MT6835 mit 21 Bit Auflösung ersetzt.
Für die Ansteuerung der Voice-Coil musste ich ein paar Klimmzüge machen: Der MT6835 SPI wird über SPI ausgelesen, was die gleichen Pins vom AF-Motor-Shield verwendet. Das Motor-Shield, das mit I2C angesteuert wird taugte trotz 12 Bit PWM auch nicht, weil die PWM-Frequenz auf 1.6kHz begrenzt ist. Ich musste daher auf die alten 2-Kanal-Arduino-Motor-Shields zurückgreifen, die ich über externe Verkabelung angeschlossen habe. Damit kann ich PWM >16kHz (z.B. 62 kHz) machen, was die Geräuschbelästigung eliminiert und die Regelung verbessert.
Die theoretische Auflösung von 3.8nm kann ich nicht erreichen. Aber die Position ist auf 10 Counts stabil und bei größeren Auslenkungen sogar auf +/-1 counts. (Vermutlich kommt man mit diesem - zugegebenermaßen etwas losen - Aufbau hier an ein prinzipielles Limit) An den Regelparametern oder der Regelung an sich muss ich noch herumfummeln. Bei größeren Auslenkungen muss ich die Motorspannung manuell etwas hochregeln, weil es sonst zu Oszillationen kommt. Aber dann hält das Teil die Position sehr gut. Offenbar ist die Regelung stabiler, wenn mehr Kraft im Spiel ist.
EDIT: PS: Ich denke mir: Das mit der Nachregelung der Spannung deutet darauf hin, dass der Dynamik-Bereich der 8-Bit PWM nicht ausreichend ist. Also entweder höher auflösende PWM oder entsprechend hoch auflösende lineare Regelung.
Konkret ist das Verhalten, dass bei kleinerer Auslenkung die Spannung auf ca. 5V herunter gefahren werden muss. Bei größerer Auslenkung reicht diese Spannung nicht, um gegen die Rückstellkraft des Flexures anzukämpfen. Dann muss ich auf 6.8V gehen.
Behalte ich die große Spannung bei kleinen Auslenkungen bei, kommt es zu Regel-Oszillationen.
Ich brauche also bei kleineren Auslenkungen eine feinfühligere Anregung. Oder hat jemand eine andere Idee?