Für die Messung der Induktivität mit dem Arduino sehe ich folgende Möglichkeiten:
1. Periodendauer-Messung
2. Impulse innerhalb einer Messzeit zählen
3. Relaxation der Spule messen: Spulenschwingkreis anregen und Oszillation auswerten
4. Frequenz-Spannungs-Umsetzer
Die Periodendauer-Messung ist bei mir noch etwas ungenau und wackelig. Wenn man niedrige Frequenzen verwendet, wird die Periodendauermessung genauer, aber die Schwankungen nehmen zu. Höhere Frequenzen können damit nicht mehr genau gemessen werden, weil noch weniger counts zur Verfügung stehen und weniger Schwingungen ausgewertet werden. Das wäre mit 2 besser hinzubekommen.
Hier nun ein Ansatz mit einem etwas hochfrequenteren Schwingkreis:
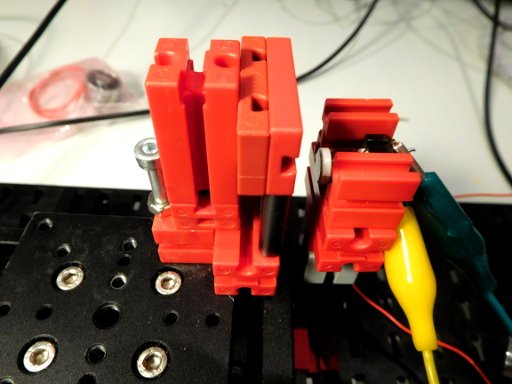
- QAG5..JPG (48.79 KiB) 22577 mal betrachtet
Die Spule ist eine Induktivität, die ich von einer alten Druckerplatine ausgelötet habe. Als Queranker ein Ferrit-Teil für Flachbandkabel aus dem gleichen Drucker. (Hätte eigentlich nicht damit gerechnet, dass ich das noch mal brauchen würde. Aber der Ferrit ist viel besser als Eisenplatten) Der Schwingkreis schwingt dann im Bereich um 130 kHz. Hier wäre interessant, ob sich der ft-Initiator eignen würde.
Um diese Frequenz zu messen, mische ich das Signal mit einem 120 kHz-Referenz-Signal aus einem Funktionsgenerator.
Die Mischung mache ich mit einem NE612-IC, den ich noch aus DRM-Zeiten herumliegen habe. Dieser IC hat praktischerweise eine eingebaute Verstärkerschaltung für einen lokalen Oszillator, an den ich den Schwingkreis mit der Mess-Spule ranhänge. Der Filter ist ein RC-Glied. Und als Komparator muss wieder der LM311 ran.
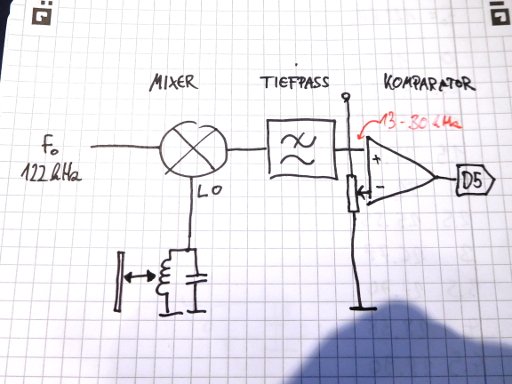
- QAG6..JPG (52.4 KiB) 22577 mal betrachtet
Die Signale sind hier zu sehen:
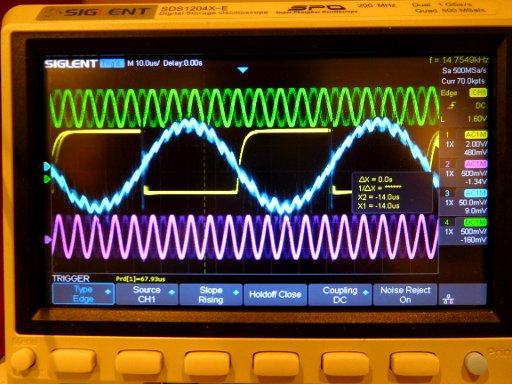
- QAG8.JPG (71.94 KiB) 22488 mal betrachtet
Grün: Mess-Signal, Magenta: Referenz-Signal, Blau: Tiefpass-gefiltertes Misch-Signal, Gelb: digitalisiertes Komparator-Signal.
Der Mischer verschiebt das Mess-Signal in einen handhabbaren Frequenzbereich (Differenzfrequenz)
Das gelbe Signal kann man dann mit Methode 2 gut messen und bekommt dann folgende Frequenzkurve (kHz vs mm)
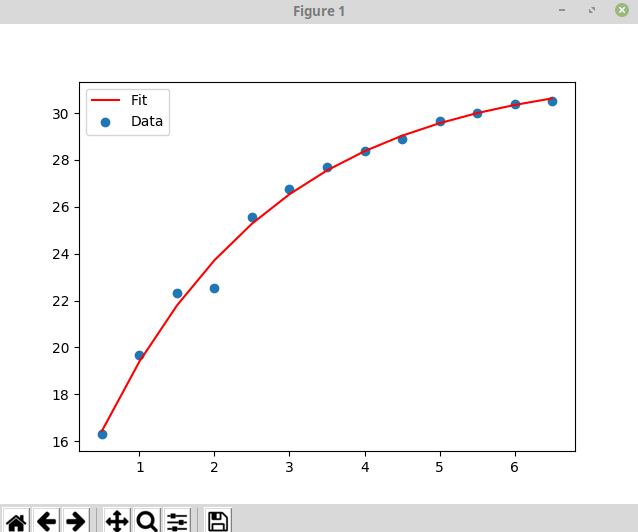
- Bildschirmfoto vom 2025-05-20 18-18-03.png (31.33 KiB) 22577 mal betrachtet
Karl könnte die Frequenz auch mit seinem Bausatz-Frequenzmesser direkt messen.
Warum nicht gleich die hohe Frequenz messen? Weil der Counter überläuft. Vermutlich könnte man das das auch mit einem Overflow-Interrupt kompensieren. Aber das hat jetzt bei mir noch nicht geklappt. Wäre aber natürlich wegen des geringeren Schaltungsaufwandes vorzuziehen. Aber die Frequenzmischung ist doch auch ganz schön und Rumstecken macht mehr Spaß als programmieren.
