Eine saubere Oszillationsbewegung hinzubekommen ist gar nicht so einfach.
Immer verkeilt sich etwas, die Drehscheibe eiert oder die Führungsachsen sind verbogen, was dann zu einem lokal erhöhten Gleitwiderstand führt.
Dieser Aufbau ist jetzt halbwegs brauchbar:
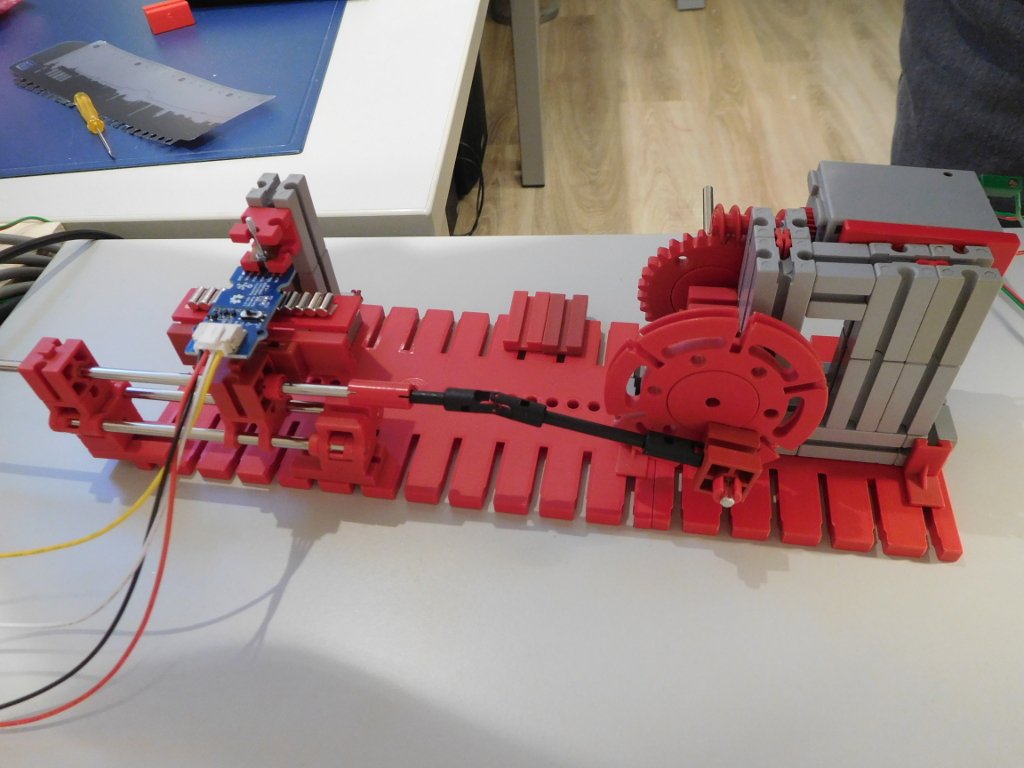
- LMag4.JPG (108.9 KiB) 32 mal betrachtet
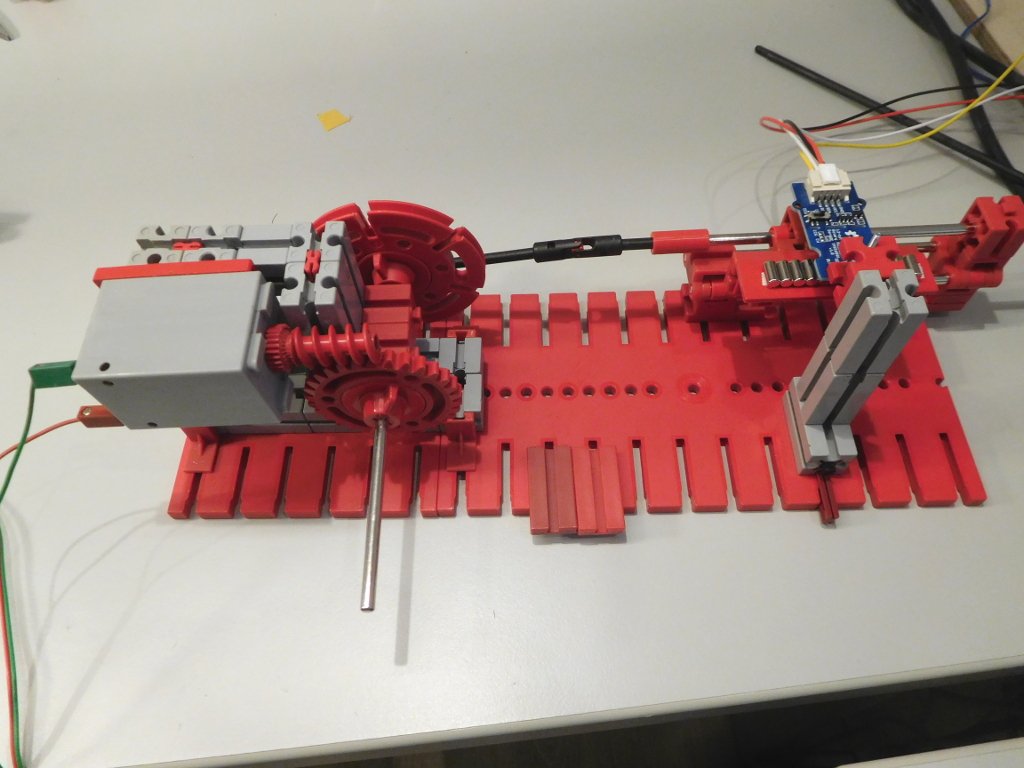
- LMag5.JPG (102 KiB) 32 mal betrachtet
Um den Magnetsensor zu positionieren, beobachte ich am Arduino-Plotter das Signal und justiere den Sensor, bis ich im Sinus-Signal keine "Treppen" mehr sehe.
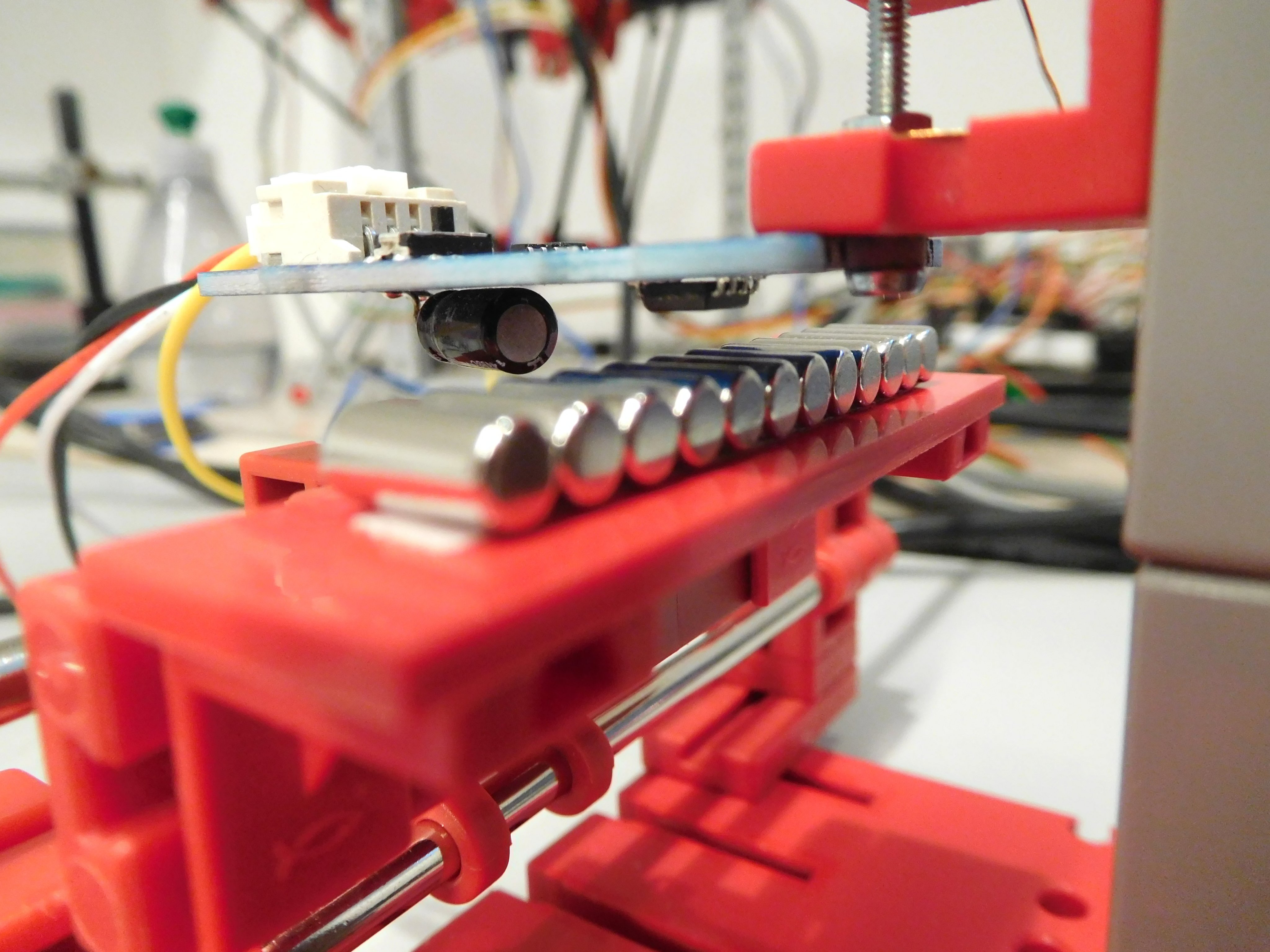
- LMag6.JPG (1.13 MiB) 32 mal betrachtet
Im Prinzip funktioniert es also. Allerdings habe ich noch keine Idee, wie man die Positionierung in einem Modell hinbekommt.
