Schau mal ins Datenblatt, der Chip kann tatsächlich auf analog *oder* PWM konfiguriert werden, ersteres erledigt ein 12bit D/A. Ich habe das Signal nicht genauer angesehen, aber nehme schon an, dass da eine "echte" analoge Spannung rauskommt. pulsIn() hat in jedem Fall keine sinnvollen Flanken entdeckt.
Ob man (theoretisch) ein PWM Signal auch verlässlich analog einlesen könnte? Keine Ahnung, gefühlsmäßig würde ich erwarten, dass es da noch eine Glättungskomponente braucht.
lg
Jan
Drehwertgeber / Drehwinkelgeber
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
Re: Drehwertgeber / Drehwinkelgeber
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
ok...da bin ich auch nicht so ganz sattelfest! ich bin davon ausgegangen, dass per PWM eine analoge Spannung simuliert wird. Bei einem Motortreiber für einen DC-Motor wird ja auch nichts anderes gemacht, oder? Ob man glätten muß, hängt wahrscheinlich von der Frequenz ab (unabhängig vom Duty).juh hat geschrieben: ↑20 Nov 2019, 09:28Schau mal ins Datenblatt, der Chip kann tatsächlich auf analog *oder* PWM konfiguriert werden, ersteres erledigt ein 12bit D/A. Ich habe das Signal nicht genauer angesehen, aber nehme schon an, dass da eine "echte" analoge Spannung rauskommt. pulsIn() hat in jedem Fall keine sinnvollen Flanken entdeckt.
Ob man (theoretisch) ein PWM Signal auch verlässlich analog einlesen könnte? Keine Ahnung, gefühlsmäßig würde ich erwarten, dass es da noch eine Glättungskomponente braucht.
lg
Jan
Die Auswertung eines PWM-Signals wäre aber schon aufwändiger, oder? Ich müsste ja die Pulse pro Zeiteinheit zählen bzw. die Dauer messen. Das geht ja wahrscheinlich nur mit entsprechender Hardware-Unterstützung.
Oder..anstatt Vermutungen anzustellen....schaue ich doch mal ins Datenblatt!
Re: Drehwertgeber / Drehwinkelgeber
Ja, aber output ist halt nicht input. Beim Ansteuern eines DC Motors per PWM spielt die Glättung des Signals wohl keine große Rolle (bin auch kein Profi) aufgrund der "Trägheit" der Magnetspulen des Motors, so denke ich mir das naiv.
Beim Input braucht eine Analogmessung beim Arduino nach meiner Erinnerung ca 0,1ms, die Frequenz des PWM Signals beim AS5600 ist aber nicht höher als 1000 Hz (Fig. 9 im Datenblatt), ein Impuls wäre also mind. 10 mal länger als die Analogmessung, das kann ohne Glättung oder softwareseitige Mittlung mehrerer (dann eher digitaler) Messungen wohl nicht gut gehen.
In jedem Fall wäre aber eine PWM Messung auch kein großes Problem. pulseIn() wäre das einfachste, blockiert aber. Alternativ per Interrupt nicht blockierend.
lg
Jan
PS: Ich merke gerade, ich weiß gar nicht, ob Du auch Arduinos benutzt, wie es da beim TX(T) aussieht, weiß ich nicht.
Beim Input braucht eine Analogmessung beim Arduino nach meiner Erinnerung ca 0,1ms, die Frequenz des PWM Signals beim AS5600 ist aber nicht höher als 1000 Hz (Fig. 9 im Datenblatt), ein Impuls wäre also mind. 10 mal länger als die Analogmessung, das kann ohne Glättung oder softwareseitige Mittlung mehrerer (dann eher digitaler) Messungen wohl nicht gut gehen.
In jedem Fall wäre aber eine PWM Messung auch kein großes Problem. pulseIn() wäre das einfachste, blockiert aber. Alternativ per Interrupt nicht blockierend.
lg
Jan
PS: Ich merke gerade, ich weiß gar nicht, ob Du auch Arduinos benutzt, wie es da beim TX(T) aussieht, weiß ich nicht.
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
ja, Arduino. Ich hatte noch nie einen fischertechnik controller!
...ganz ehrlich, ist mir zu groß, zu unflexibel und vor allem zu teuer!
hab mir diese Woche nochmal 2 Arduino Mega je 11.99 € bestellt!
laut Beschreibung hat der TXT aber 4 schnelle Zähleingänge: Digital, Frequenz bis 1kHz, sollte also auch per PWM gehen
Re: Drehwertgeber / Drehwinkelgeber
So, das Gehäuse ist fertig. War etwas knifflig, da die Platine Anschlüsse auf zwei Seiten hat, was die Anbaumöglichkeiten einschränkt.
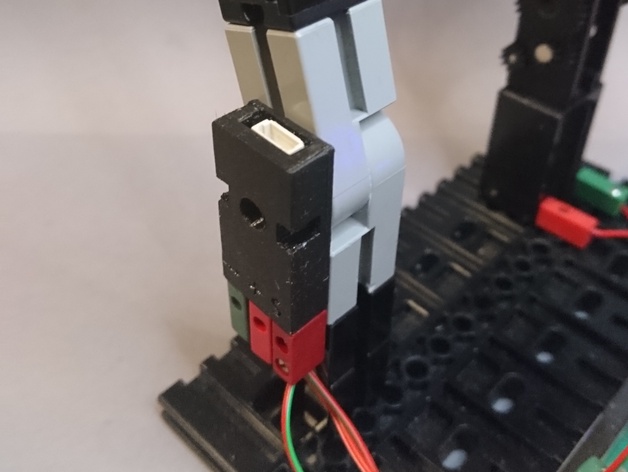
Ich habe die Testaufbauten für das Potis analog nachgebaut. Der Teststand zeigt, dass exakte Winkel und Linearität darauf angewiesen sind, dass die Magnetachse exakt zentral zum Sensor-chip ausgerichtet ist. Daher bin ich mit dem Design noch nicht ganz zufrieden. Weniger fehleranfällig wäre es, wenn der Magnet mit ins Gehäuse integriert wird, das würde allerdings die Flexibilität einschränken.
Der Test mit dem PID-Arm (s. Video) zeigt aber klar die Vorteile. Der kontaktlose Sensor eliminiert den Reibungswiderstand des Potis und macht die Sache wesentlich geschmeidiger und agiler.
https://www.thingiverse.com/thing:3992842
lg
Jan
Ich habe die Testaufbauten für das Potis analog nachgebaut. Der Teststand zeigt, dass exakte Winkel und Linearität darauf angewiesen sind, dass die Magnetachse exakt zentral zum Sensor-chip ausgerichtet ist. Daher bin ich mit dem Design noch nicht ganz zufrieden. Weniger fehleranfällig wäre es, wenn der Magnet mit ins Gehäuse integriert wird, das würde allerdings die Flexibilität einschränken.
Der Test mit dem PID-Arm (s. Video) zeigt aber klar die Vorteile. Der kontaktlose Sensor eliminiert den Reibungswiderstand des Potis und macht die Sache wesentlich geschmeidiger und agiler.
https://www.thingiverse.com/thing:3992842
lg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
super Sache!
In welchem Modus betreibst Du den Sensor jetzt? Hat PWM Vorteile in der Genauigkeit gegenüber Analog?
Braucht man den zweiten Anschluss nur für's Parametrieren oder auch für den laufenden Betrieb?
Und noch ne Frage:
Du hast doch schon ein Loch im Gehäuse mittig zum Sensor. Ist es so gedacht, dass man damit den Magneten zentrieren kann?
In welchem Modus betreibst Du den Sensor jetzt? Hat PWM Vorteile in der Genauigkeit gegenüber Analog?
Braucht man den zweiten Anschluss nur für's Parametrieren oder auch für den laufenden Betrieb?
Und noch ne Frage:
Du hast doch schon ein Loch im Gehäuse mittig zum Sensor. Ist es so gedacht, dass man damit den Magneten zentrieren kann?
Re: Drehwertgeber / Drehwinkelgeber
Bisher habe ich nur den vorkonfigurierten Analogmodus verwendet. Das scheint mir für die meisten ft-Zwecke ausreichend genau und spart einem den frickeligen JST-Stecker. Einen Vorteil von PWM sehe ich beim Arduino nicht, eher Nachteile, da man dafür in der Regel Interrupts brauchen wird. Die Genauigkeit habe ich aber noch nicht verglichen, kann mir aber auch da keinen Vorteil vorstellen.
I2C habe ich noch nicht getestet. Vorteil wäre hier, dass man die digitalen Messwerte in voller 12-bit Auflösung abgreifen kann und nicht den Umweg über D/A (Chip) und A/D (Arduino) Wandler gehen muss, das sieht man gut im Blockdiagramm in fig. 2 des Datenblatts. Ob der Genauigkeitsgewinn in den üblichen ft-Anwendung eine Rolle spielt? Ich glaube eher nicht. Gleiches gilt für den konfiguierbaren Winkelbereich. Eine Auflösung von 360°/1024 scheint mir für unsere Zwecke ausreichend.
Interessant bei I2C sind noch Feinheiten wie Filter und Hysterese, die Signalglättung und Jitter-Unterdrückung bei Stillstand bieten, habe ich aber auch noch nicht getestet.
Fazit zu I2C: kann sich lohnen und interessant sein, das Modul ist aber auch gut ohne einzusetzen und funktioniert dann im Prinzip genau wie das Poti, außer dass man auf 5V festgelegt ist und halt die vollen 360° bekommt.
Ja, das Loch ist zum Zentrieren gedacht, ist aber etwas frickelig den Magneten entsprechend zu montieren. Wie gesagt, da wäre eine integrierte Lösung wahrscheinlich besser, die erzwingt dann aber einen deutlich klobigeren Formfaktor.
lgj
I2C habe ich noch nicht getestet. Vorteil wäre hier, dass man die digitalen Messwerte in voller 12-bit Auflösung abgreifen kann und nicht den Umweg über D/A (Chip) und A/D (Arduino) Wandler gehen muss, das sieht man gut im Blockdiagramm in fig. 2 des Datenblatts. Ob der Genauigkeitsgewinn in den üblichen ft-Anwendung eine Rolle spielt? Ich glaube eher nicht. Gleiches gilt für den konfiguierbaren Winkelbereich. Eine Auflösung von 360°/1024 scheint mir für unsere Zwecke ausreichend.
Interessant bei I2C sind noch Feinheiten wie Filter und Hysterese, die Signalglättung und Jitter-Unterdrückung bei Stillstand bieten, habe ich aber auch noch nicht getestet.
Fazit zu I2C: kann sich lohnen und interessant sein, das Modul ist aber auch gut ohne einzusetzen und funktioniert dann im Prinzip genau wie das Poti, außer dass man auf 5V festgelegt ist und halt die vollen 360° bekommt.
Ja, das Loch ist zum Zentrieren gedacht, ist aber etwas frickelig den Magneten entsprechend zu montieren. Wie gesagt, da wäre eine integrierte Lösung wahrscheinlich besser, die erzwingt dann aber einen deutlich klobigeren Formfaktor.
lgj
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
Kleiner Nachtrag zum AS5600, v.a. falls Richard hier noch mitliest:
Inzwischen gibt es ein zweites Modul, bei dem der I2C-Anschluss nicht erst nachgerüstet werden muss, sondern bereits breadboardkompatibel rausgeführt wurde:
https://de.aliexpress.com/item/4000507199893.html
lg
Jan
Inzwischen gibt es ein zweites Modul, bei dem der I2C-Anschluss nicht erst nachgerüstet werden muss, sondern bereits breadboardkompatibel rausgeführt wurde:
https://de.aliexpress.com/item/4000507199893.html
lg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
Und noch ein kleiner Nachtrag:
Das Board ist für 5V konfiguriert, die gehen dann auf einen internen Spannungswandler, der Chip selbst läuft mit 3,3V. Wenn man die Pins 1 und 2 des Chips kurzschließt (vgl. Datenblatt, Fig. 13), überbrückt man den Spannungswandler und kann das Modul dann auch mit 3,3V (aber nicht mehr mit 5V) betreiben.
Außerdem habe ich inzwischen den I2C Modus probiert, er lohnt sich v.a. wenn der ADC-Wandler des µC nicht besonders genau oder linear ist (wie bei den ESPs) ist, die höhere Auflösung (12 statt 10 bit) dürfte in der Praxis eine geringere Rolle spielen. Nett auch, dass man per I2C die Präsenz eines Magneten und die Stärke des Magnetfelds auslesen kann.
vg
Jan
Das Board ist für 5V konfiguriert, die gehen dann auf einen internen Spannungswandler, der Chip selbst läuft mit 3,3V. Wenn man die Pins 1 und 2 des Chips kurzschließt (vgl. Datenblatt, Fig. 13), überbrückt man den Spannungswandler und kann das Modul dann auch mit 3,3V (aber nicht mehr mit 5V) betreiben.
Außerdem habe ich inzwischen den I2C Modus probiert, er lohnt sich v.a. wenn der ADC-Wandler des µC nicht besonders genau oder linear ist (wie bei den ESPs) ist, die höhere Auflösung (12 statt 10 bit) dürfte in der Praxis eine geringere Rolle spielen. Nett auch, dass man per I2C die Präsenz eines Magneten und die Stärke des Magnetfelds auslesen kann.
vg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
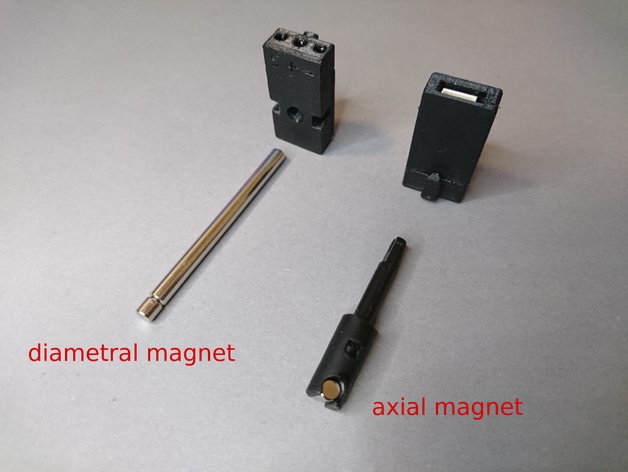
Noch ein kleiner Hinweis zu dem AS5600: Bei meinen über Aliexpress bestellten AS5600 Sensoren waren die mitgelieferten (!) Magnete nicht diametral polarisiert, entsprechend konnte ich erst keine vernünftigen Ergebnisse bekommen. Mit den korrekten Magneten funktioniert es. Vielleicht spart der Hinweis ja dem einen oder anderen unnötiges "Debugging".
VG, Volker
VG, Volker
Re: Drehwertgeber / Drehwinkelgeber
Hallo Volker,
danke für die Warnung, hatte gar nicht gesehen, dass die jetzt in Kombi angeboten werden. Aber Aliexpress-Bestellungen haben ja öfter mal diesen Wundertüten-Charme...
Im Prinzip kann man einen axial magnetisierten Magneten natürlich auch so anbringen (und bei meinem Gehäuse ggf. die Rückseite verwenden), aber diametral ist in den meisten Fällen natürlich sinnvoller:
vg
Jan
danke für die Warnung, hatte gar nicht gesehen, dass die jetzt in Kombi angeboten werden. Aber Aliexpress-Bestellungen haben ja öfter mal diesen Wundertüten-Charme...
Im Prinzip kann man einen axial magnetisierten Magneten natürlich auch so anbringen (und bei meinem Gehäuse ggf. die Rückseite verwenden), aber diametral ist in den meisten Fällen natürlich sinnvoller:
vg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
Hallo Jan,
ja, tatsächlich passt der "falsche" Magnet sogar ganz gut in den Kabelhalter
.
Aber auf Dauer sind die diametralen 4mm Magnete natürlich eine bessere Lösung.
Vg, Volker
ja, tatsächlich passt der "falsche" Magnet sogar ganz gut in den Kabelhalter
- magnet.jpg (73.99 KiB) 12044 mal betrachtet
Aber auf Dauer sind die diametralen 4mm Magnete natürlich eine bessere Lösung.
Vg, Volker
Re: Drehwertgeber / Drehwinkelgeber
Absolute Drehwinkelgeber sind schon toll, weil man nicht wie bei inkrementellen Drehgebern Timingprobleme hat und durch Jitter etc. Pulse verlieren kann. Ich habe vor, 3 matgnetische Encoder mit einem Arduino auszulesen.
Hat jemand schon mit folgendem AS5600 Board (12-Bit rotary Encoder) Erfahrungen?
https://www.seeedstudio.com/Grove-12-bi ... -4192.html
Insbesondere habe ich folgende Fragen:
Hat jemand schon mit folgendem AS5600 Board (12-Bit rotary Encoder) Erfahrungen?
https://www.seeedstudio.com/Grove-12-bi ... -4192.html
Insbesondere habe ich folgende Fragen:
- Hat jemand schon eine Halterung für FT designed (3D-Druck)?
- Wie kann ich mit einem Arduino mehrere von diesen Teilen über einen i2C auslesen?
-
fishfriend

- Beiträge: 2218
- Registriert: 26 Nov 2010, 11:45
Re: Drehwertgeber / Drehwinkelgeber
Hallo...
Gegenfrage: Wo kriegst du das Modul her? Aus CN?
Ich hab mal etwas gesucht, scheint aber nicht lieferbar zu sein.
Mit frundlichen Grüßen
fishfriend
Holger Howey
Gegenfrage: Wo kriegst du das Modul her? Aus CN?
Ich hab mal etwas gesucht, scheint aber nicht lieferbar zu sein.
Mit frundlichen Grüßen
fishfriend
Holger Howey
ft Riesenräder PDF: ftcommunity.de/knowhow/bauanleitungen
TX-Light: Arduino und ftduino mit RoboPro
TX-Light: Arduino und ftduino mit RoboPro
Re: Drehwertgeber / Drehwinkelgeber
Hallo,
Die I2C Adresse ist nicht konfigurierbar (s. Datenblatt), mehrere an einem Bus also nur mit einem I2C-Multiplexer wie z.B. diesem. Aber wie ich oben schrieb ist der I2C-Modus nett, aber zur reinen Winkelerfassung tut es auch ein Analog-Eingang sehr gut.
vg
Jan
Das Board kenne ich nicht, aber da der Chip identisch ist, dürfte alles oben Gesagte auch hierfür gelten. Ein Gehäuse ist mir nicht bekannt. Scheint aber tatsächlich gar nicht mehr lieferbar zu sein, von daher vielleicht auch egal. Die beiden oben erwähnten Module sind in jedem Fall noch bei verschiedenen Quellen verfügbar.atzensepp hat geschrieben: ↑30 Aug 2021, 13:33Hat jemand schon mit folgendem AS5600 Board (12-Bit rotary Encoder) Erfahrungen?
https://www.seeedstudio.com/Grove-12-bi ... -4192.html
Insbesondere habe ich folgende Fragen:
- Hat jemand schon eine Halterung für FT designed (3D-Druck)?
- Wie kann ich mit einem Arduino mehrere von diesen Teilen über einen i2C auslesen?
Die I2C Adresse ist nicht konfigurierbar (s. Datenblatt), mehrere an einem Bus also nur mit einem I2C-Multiplexer wie z.B. diesem. Aber wie ich oben schrieb ist der I2C-Modus nett, aber zur reinen Winkelerfassung tut es auch ein Analog-Eingang sehr gut.
vg
Jan
Meine 3D-Designs für fischertechnik: www.printables.com/social/202816-juh www.thingiverse.com/juh
Re: Drehwertgeber / Drehwinkelgeber
Hallo,
die Encoder sind etwas schwierig zu bekommen es sei, man bezieht diese über Ebay direkt aus China.
Dann können evtl. die MwSt und Bearbeitungskosten hinzukommen. Zoll ist sicherlich weiterhin erst ab
150 Euro fällig.
Ein halbwegs preisgünstiger Link bei Amazon für die kleine Ausführung.
https://www.amazon.de/Ycncixwd-Encoder- ... S1YG&psc=1
Diametral magnetische Magnete mit 4mm Durchmesser und 4mm Länge.
https://www.mtsmagnete.de/neodym-scheib ... ert/a-4470
die Encoder sind etwas schwierig zu bekommen es sei, man bezieht diese über Ebay direkt aus China.
Dann können evtl. die MwSt und Bearbeitungskosten hinzukommen. Zoll ist sicherlich weiterhin erst ab
150 Euro fällig.
Ein halbwegs preisgünstiger Link bei Amazon für die kleine Ausführung.
https://www.amazon.de/Ycncixwd-Encoder- ... S1YG&psc=1
Diametral magnetische Magnete mit 4mm Durchmesser und 4mm Länge.
https://www.mtsmagnete.de/neodym-scheib ... ert/a-4470
Re: Drehwertgeber / Drehwinkelgeber
ich hatte die Boards bezogen über https://www.robotshop.com/de/de/grove-1 ... s5600.html
Wobei ich etwas länger warten musste, da sie grad nicht auf Lager waren. Digikey hat die Teile von SeedStudio auch im Angebot. Prinzipiell könnte man auch nur die ICs organisieren und die 8-Pin SOIC to DIP -Adapter wenn man löten will
Die diametralen Magnete sind schon toll. Ich nehme Magnetwürfelchen aus dem Baumarkt.
Mit dem I2C-Multiplexer probiere ich was mit einem 4051 oder was ich so rumliegen habe.
Wobei ich etwas länger warten musste, da sie grad nicht auf Lager waren. Digikey hat die Teile von SeedStudio auch im Angebot. Prinzipiell könnte man auch nur die ICs organisieren und die 8-Pin SOIC to DIP -Adapter wenn man löten will
Die diametralen Magnete sind schon toll. Ich nehme Magnetwürfelchen aus dem Baumarkt.
Mit dem I2C-Multiplexer probiere ich was mit einem 4051 oder was ich so rumliegen habe.
Re: Drehwertgeber / Drehwinkelgeber
Hallo,
Zwar die "große" Ausführung. Wäre aber gut zu verschmerzen.
prima Link, danke.ich hatte die Boards bezogen über https://www.robotshop.com/de/de/grove-1 ... s5600.html
Zwar die "große" Ausführung. Wäre aber gut zu verschmerzen.
Re: Drehwertgeber / Drehwinkelgeber
So kann man die Encoder von Sparkfun und den Magnetwürfel mit ft verwenden.
Die Platine ist mit einer M2-Schraube an einem Statik-Winkel festgeschraubt. Der Magnetwürfel wurde auf einer Drehscheibe eingeklemmt.
Die Achse ist aus Kunststoff. (Metall ging nicht, da der Würfel in der benötigten Orientierung nicht mittig sitzen will)
Der Aufbau ist jetzt erst mal provisorisch.
Für das Multiplexen von 3 Einheiten habe ich erst mal in Ermangelung eines i2C-Expanders einen Multiplexer aus TTL (74LS139, 74LS04) und CMOS-IC (MC14016) für die SDA-Leitung gebaut.
(Wenn man einen HEF 4051 zur Hand hat würde der ausreichen). SCK habe ich erst mal nicht gemultiplext, wäre vermutlich besser. Es funktioniert aber.
Da die Encoder die absolute Position registrieren geht beim Umschalten nichts verloren.
- Ein ft-Rig mit AS5600-Platine von Sparkfun
- MagEncoder.JPG (46.57 KiB) 10968 mal betrachtet
Die Achse ist aus Kunststoff. (Metall ging nicht, da der Würfel in der benötigten Orientierung nicht mittig sitzen will)
Der Aufbau ist jetzt erst mal provisorisch.
Für das Multiplexen von 3 Einheiten habe ich erst mal in Ermangelung eines i2C-Expanders einen Multiplexer aus TTL (74LS139, 74LS04) und CMOS-IC (MC14016) für die SDA-Leitung gebaut.
(Wenn man einen HEF 4051 zur Hand hat würde der ausreichen). SCK habe ich erst mal nicht gemultiplext, wäre vermutlich besser. Es funktioniert aber.
Da die Encoder die absolute Position registrieren geht beim Umschalten nichts verloren.
Re: Drehwertgeber / Drehwinkelgeber
Diese Variante für die Befestigung des Sparkfun-Moduls ist gut tauglich.
Der Magnetwürfel ist mit doppelseitigem Klebeband fixiert.
Der Magnetwürfel ist mit doppelseitigem Klebeband fixiert.
- AS5600-Platine von Sparkfun in einem ft-Aufbau
- AS5600.jpg (38.33 KiB) 10824 mal betrachtet