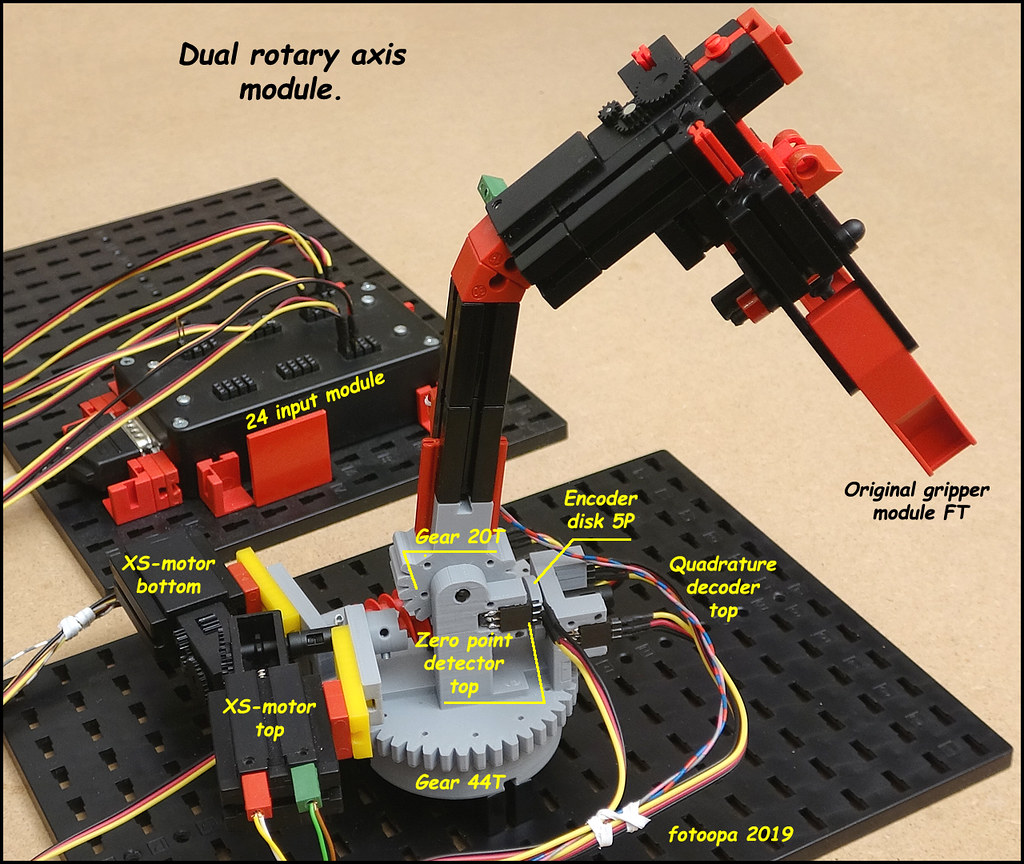
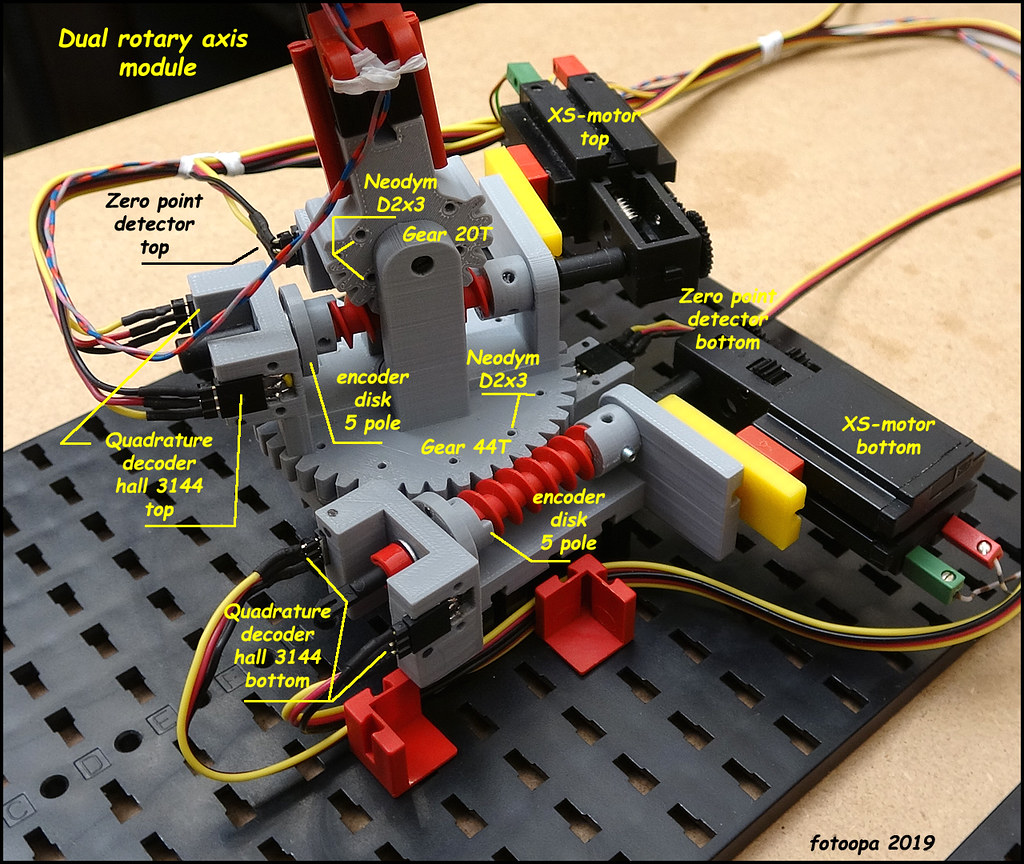
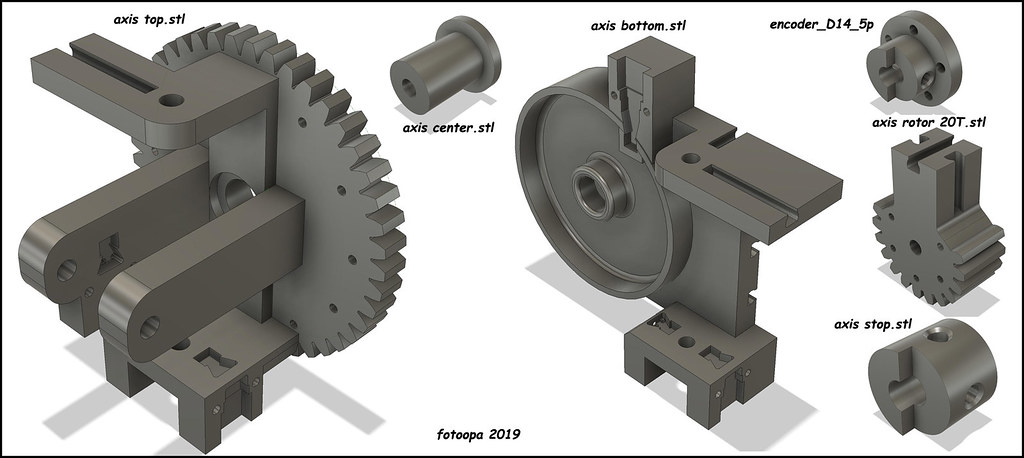
The upper axis has a pivoting block with 20 teeth. The gear profile is adapted to work with the worm gear of FT without much backlash. On the contours of this rotating block are small holes provided to apply a neodymium magnet D2x3mm. This magnet serves as a home point for calibration. On the worm shaft is a small disk encoder with 5 magnets. Through quadrature detection you get 20 pulses per revolution. The angle adjustment accuracy of the pivot block is therefore 1/400 or 0.9 degrees. The total angular rotation is slightly more than 180 degrees. The lower turntable has a gear with 44 teeth. It can rotate the full 360 degrees. The accuracy here is 1/880 = 0.41 degrees. The worm shaft also has an encoder disk with 5 magnets (20 pulses/rotation). The encoder disc is adapted to the worm so that it cannot slip on the shaft. All necessary .stl files are available here.
I tested all parts, mounted the hall detectors and measured the signals. The quadrature detection automatically possesses the correct 90 degree phase shift. You don't have to adjust anything. The XS motor is used with its standard reduction block and has about 140 revolutions/minute on the worm (2.35 rec/sec). An encoder pulse corresponds to about 21 msec. Your quadrature decoder must therefore be able to process the pulses within these 21 msec, or even better 15 msec because there is always a small deviation possible (phase shift is 90° +/- 20%).
On the upper rotation arm I mounted an original FT grip module. The intention is to replace this grip module with a more compact version with built-in electronics.
3D printer settings:
I always use PolyMaker polyMax PLA filament. This filament is much stronger than the normal PLA, even stronger than ABS. The printed pieces are very clean and the parts slide gently over each other. The tolerances are very good and very little finishing is required. For some parts you do need to use supports. Brim or Raft are not needed. I don't have a heated table but keep the printing plate under warm water for a while before printing. On my FlashForge Finder I use the Standard settings with a temperature of 210°.
Hall sensor: https://www.conrad.be/p/tru-components- ... en-1572870
Neodym magnets: https://www.supermagnete.be/staafmagnet ... _S-02-03-N
A few pictures:
On Flickr: https://www.flickr.com/photos/fotoopa_hs/47176627212
On Flickr: https://www.flickr.com/photos/fotoopa_hs/33352932458
On Flickr: https://www.flickr.com/photos/fotoopa_hs/47176627412
Files on Thingiverse:
https://www.thingiverse.com/thing:3456823
The next task is to rework the gripper to a smaller version. I already see people here on the forum working on this subject. I try to find also a solution for this gripper.
Frans