Robot TX
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
Robot TX
also hallo erstma. ich bin schon einiges am Rumprobieren mit dem "Robo TX Controller" nun ist meine frage kann man für motoren / Magnetventile noch andere ausgänge nutzen außer die M1-M4 ????????????????? habe bisher noch die o ausgänge gefunden aber die hat die steuerung ja nicht. wie witzig von der software. Nun ist meine frage welche ausgänge man noch für motoren nutzen kann bzw magnetventile. Oder muss man dafür nochma extra geld ausgeben für noch eine steuerung und die dann miteinander koppeln ????????
-
FischerPapa
- Beiträge: 116
- Registriert: 01 Nov 2010, 22:39
- Wohnort: Wabern CH-BE
Re: Robot TX
Hallo,
Natürlich kannst du die O Ausgänge steuern. Einfach in Robo Pro Rechtklick und dann dort auf Lampe umstellen. Dann kannst du den entsprechenden Ausgang wählen. Und nein es gibt nicht mehr Ausgänge. Wenn das I2C irgendwann mal funktioniert, kannst du natürlich auch dort noch Module anschliessen und so Motoren steuern.
Natürlich kannst du die O Ausgänge steuern. Einfach in Robo Pro Rechtklick und dann dort auf Lampe umstellen. Dann kannst du den entsprechenden Ausgang wählen. Und nein es gibt nicht mehr Ausgänge. Wenn das I2C irgendwann mal funktioniert, kannst du natürlich auch dort noch Module anschliessen und so Motoren steuern.
Re: Robot TX
Hallo eco,
außerdem hilft es immer enorm bevor man Geräte versucht zu bedienen erst einmal die Bedienungsanleitung komplett zu lesen.
Da steht meist sehr viel drin und man lern auch gleich die vielen Funktionen kennen die man sonst nicht nutzen würde.
außerdem hilft es immer enorm bevor man Geräte versucht zu bedienen erst einmal die Bedienungsanleitung komplett zu lesen.
Da steht meist sehr viel drin und man lern auch gleich die vielen Funktionen kennen die man sonst nicht nutzen würde.
Grüße
Reiner
Reiner
Re: Robot TX
Hallo,
die O-Ausgänge hat eco ja wohl in RoboPro gefunden, nicht aber auf dem TX.
Die O-Ausgänge sind eigentlich die M-Ausgänge, nur dass jeder Pol eines M-Ausgangs einzeln zur Ansteuerung verwendet wird. Die Verbraucher (Motoren, Ventile) werden dann mit einer Leitung einfach an den einen Anschluss des M-Ausgangs angeschlossen und mit dem anderen an Masse (? , bitte nachlesen)
So, jetzt hoffen wir nur, das Eco sich wieder meldet ...
Gruß
Holger
die O-Ausgänge hat eco ja wohl in RoboPro gefunden, nicht aber auf dem TX.
Die O-Ausgänge sind eigentlich die M-Ausgänge, nur dass jeder Pol eines M-Ausgangs einzeln zur Ansteuerung verwendet wird. Die Verbraucher (Motoren, Ventile) werden dann mit einer Leitung einfach an den einen Anschluss des M-Ausgangs angeschlossen und mit dem anderen an Masse (? , bitte nachlesen)
So, jetzt hoffen wir nur, das Eco sich wieder meldet ...
Gruß
Holger
Re: Robot TX
Jezz weiß ich wo mein problem lag was ich ned gerafft hatte. wenn ich zwei magnetventile auf z.b. auf M3 anschließe das eine auf 5 und das andere auf der 6. ich wusste nur nicht wie ich jezz die 5 ansteuere und die 6 ansteuere. Das man dann in der Software das man das so macht das man das dann auf ein und umgekehrt ein einstellen muss je nach dem welches ventil man ansprechen muss. darauf muss man erstma kommen. Darin lag im Groben mein Problem. Was man auch schlecht irgendwo herauslesen kann. Bzw ich es nicht zum nachlesen gefunden hatte. Mein Problem ist somit erstma gelöst.
Re: Robot TX
Hallo,
Du hast zwar geheim gehalten, /welche/ Software Du witzig findest, aber wenn es RoboPro ist, ist die Lösung anders. Du kannst Du beide Ausgänge anschalten, nachdem Du den 'Typ' des Ausgangs von 'Motor' auf 'Lampe' umgeschaltet hast. Das hat mit 'links' und 'rechts' also gar nichts zu tun. Nachdem Du den Typ des Ausgangs umgeschaltet hast, kannst Du auch beide Ausgänge gleichzeitig anschalten.
Übrigens scheint deine Komma-Taste kaputt zu sein.
Gruß
Heiko
nein.Das man dann in der Software das man das so macht das man das dann auf ein und umgekehrt ein einstellen muss je nach dem welches ventil man ansprechen muss. darauf muss man erstma kommen.
Du hast zwar geheim gehalten, /welche/ Software Du witzig findest, aber wenn es RoboPro ist, ist die Lösung anders. Du kannst Du beide Ausgänge anschalten, nachdem Du den 'Typ' des Ausgangs von 'Motor' auf 'Lampe' umgeschaltet hast. Das hat mit 'links' und 'rechts' also gar nichts zu tun. Nachdem Du den Typ des Ausgangs umgeschaltet hast, kannst Du auch beide Ausgänge gleichzeitig anschalten.
Übrigens scheint deine Komma-Taste kaputt zu sein.
Gruß
Heiko
Re: Robot TX
ja ich nutze robopro. un die kommataste ist nicht kaputt. 
Re: Robot TX
A motor output (M1..M4) on the TXC brick is a full bridge output.
The GND is not in use. See these two picture.
Note:
These picture are only an ilustration of a full bridge and they are not showing the real implemantation in the fischertechnik interfaces.
In the picture, the green motor has been connected with M1 (O1 and O2)
This also the reason that you are able to inverse the motor power with a single 9V power supply (-9V..0..9V) .
0..9V output, direction forward (CW=clock wise)
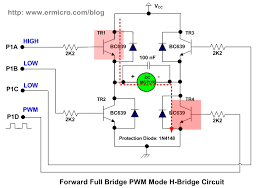
In the picture, the green motor has been connected with M1 (O1 and O2)
-9V..0 output, direction backward (CCW=counter clock wise)
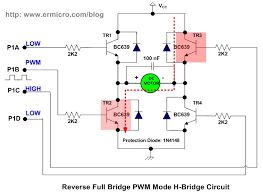
The outputs O1..O8 are halve bridge outputs (only 0..9V)
These output are used with the GND.
M1==>O1+O2
The initialisation between the use as Motor output or as normale output in different.
(See also the FtMscLib API function 3.11 SetFtMotorConfig.)
TA (transfer Area) TA-CONFIG (variable motor BOOL8[])
The GND is not in use. See these two picture.
Note:
These picture are only an ilustration of a full bridge and they are not showing the real implemantation in the fischertechnik interfaces.
In the picture, the green motor has been connected with M1 (O1 and O2)
This also the reason that you are able to inverse the motor power with a single 9V power supply (-9V..0..9V) .
0..9V output, direction forward (CW=clock wise)
In the picture, the green motor has been connected with M1 (O1 and O2)
-9V..0 output, direction backward (CCW=counter clock wise)
The outputs O1..O8 are halve bridge outputs (only 0..9V)
These output are used with the GND.
M1==>O1+O2
The initialisation between the use as Motor output or as normale output in different.
(See also the FtMscLib API function 3.11 SetFtMotorConfig.)
TA (transfer Area) TA-CONFIG (variable motor BOOL8[])
Re: Robot TX
Hallo eco!
Du must in Level 2 oder höher umschalten.
Grüße robopro
Du must in Level 2 oder höher umschalten.
Grüße robopro
Grüße robopro!
Ohne ft ist alles doof!
Ohne ft ist alles doof!