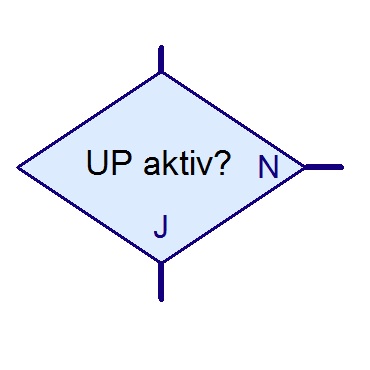
Und ich habe noch einen Wunsch: Es sollte eine Verzweigung geben, mit der sich abfragen lässt,
ob das Unterprogramm, in dem die Verzweigung ist, gerade aktiv ist oder nicht.
Der Befehl könnte so aussehen:
WERNER


Das würde mir auch einen grossen Wunsch erfüllen - Es wäre klasse wenn Daten in echtzeit in einen csv file geschrieben werden und wenn möglich auch aus einem csv in Robopro gelesen werden können. Die in einen csv file geschrieben Daten könnten dann direkt in Excel grafisch angezeigt werden. So lasse ich auch bei Robotsystem im Laborbereich Daten anzeigen - bedarf nur eines kleinen bat files der zwischendurch den csv file kopiert, um Probleme mit Schreibrechten zu umgehen.Muani hat geschrieben:Hallo zusammen,
ich würde mich freuen, wenn's beim nächsten Update eine dynamische Datenverarbeitung von csv-Dateien geben würde. Dh. dass die Software zur Programmlaufzeit auf Änderung der csv-Datei reagieren kann.
Viele Grüße
-> Zum Threadwerner hat geschrieben: Dass man bei dem Stoppbefehl zwischen "diesen Prozess stoppen" und "alle Prozesse stoppen"
(und evtl. in Unterprogrammen auch "alle Prozesse in diesem UP stoppen") wählen kann.

