
Richtig, für Odometrie müsste man auch die Anfangsposition exakt bestimmen, sonst macht das alles wenig Sinn. Und Leute mit Kettenfahrwerk können Odometrie eh vergessen.
Ein Kompass reicht eventuell nicht ganz aus, weil die Dinger öfters etwas träge reagieren, also ein paar Sekunden länger brauchen um den neuen Winkel korrekt anzuzeigen.
Auch muss man beim Kompass mit einigen Ungenauigkeiten leben, bzw mit einem "leichtem Zittern" des Wertes. Aber ein Schritt nach dem anderen.
GPS-Navigation mit dem TX
Forumsregeln
Bitte beachte die Forumsregeln!
Bitte beachte die Forumsregeln!
Re: GPS-Navigation mit dem TX
"Propaganda does not deceive people; it merely helps them to deceive themselves."
E Hoffer
E Hoffer
-
Dirk Fox

- ft:pedia-Herausgeber
- Beiträge: 1833
- Registriert: 01 Nov 2010, 00:49
- Wohnort: Karlsruhe
- Kontaktdaten:
Re: GPS-Navigation mit dem TX
Hallo zusammen,
nach ein paar Unterbrechnungen durch andere Projekte steht jetzt auch mein GPS-Roboter vor der Fertigstellung
Ich verspreche mir eine höhere Genauigkeit von den beiden folgenden Maßnahmen:
- einem "Satelliten-Filer": ausgewertet wird nur, wenn mindestens sechs (oder sogar sieben) Satellitensignale empfangen werden, und
- einem "Höhen-Filter": da ich weiß, auf welcher Höhe der Roboter sich befindet, sollte sich an der Höhenangabe die Güte der Positionsbestimmung ablesen lassen.
thkais Hinweis (zweite, feste Station an bekannter Position) werde ich auch mal ausprobieren: ein zweiter TX, der den Fehler herausrechnet und per Bluetooth übermittelt (für kleine Distanzen sollte das für die Übertragung zum Roboter genügen - wenigstens als "Proof of Concept").
Sehr spannend. Irgendwie sollten wir doch auf die 2-cm-Genauigkeit kommen
Gruß, Dirk
nach ein paar Unterbrechnungen durch andere Projekte steht jetzt auch mein GPS-Roboter vor der Fertigstellung
Ich verspreche mir eine höhere Genauigkeit von den beiden folgenden Maßnahmen:
- einem "Satelliten-Filer": ausgewertet wird nur, wenn mindestens sechs (oder sogar sieben) Satellitensignale empfangen werden, und
- einem "Höhen-Filter": da ich weiß, auf welcher Höhe der Roboter sich befindet, sollte sich an der Höhenangabe die Güte der Positionsbestimmung ablesen lassen.
thkais Hinweis (zweite, feste Station an bekannter Position) werde ich auch mal ausprobieren: ein zweiter TX, der den Fehler herausrechnet und per Bluetooth übermittelt (für kleine Distanzen sollte das für die Übertragung zum Roboter genügen - wenigstens als "Proof of Concept").
Sehr spannend. Irgendwie sollten wir doch auf die 2-cm-Genauigkeit kommen
Gruß, Dirk
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: GPS-Navigation mit dem TX
Hallo ft-GPS-fans,
wir haben weitere Modifikationen des Fahrroboters getestet:
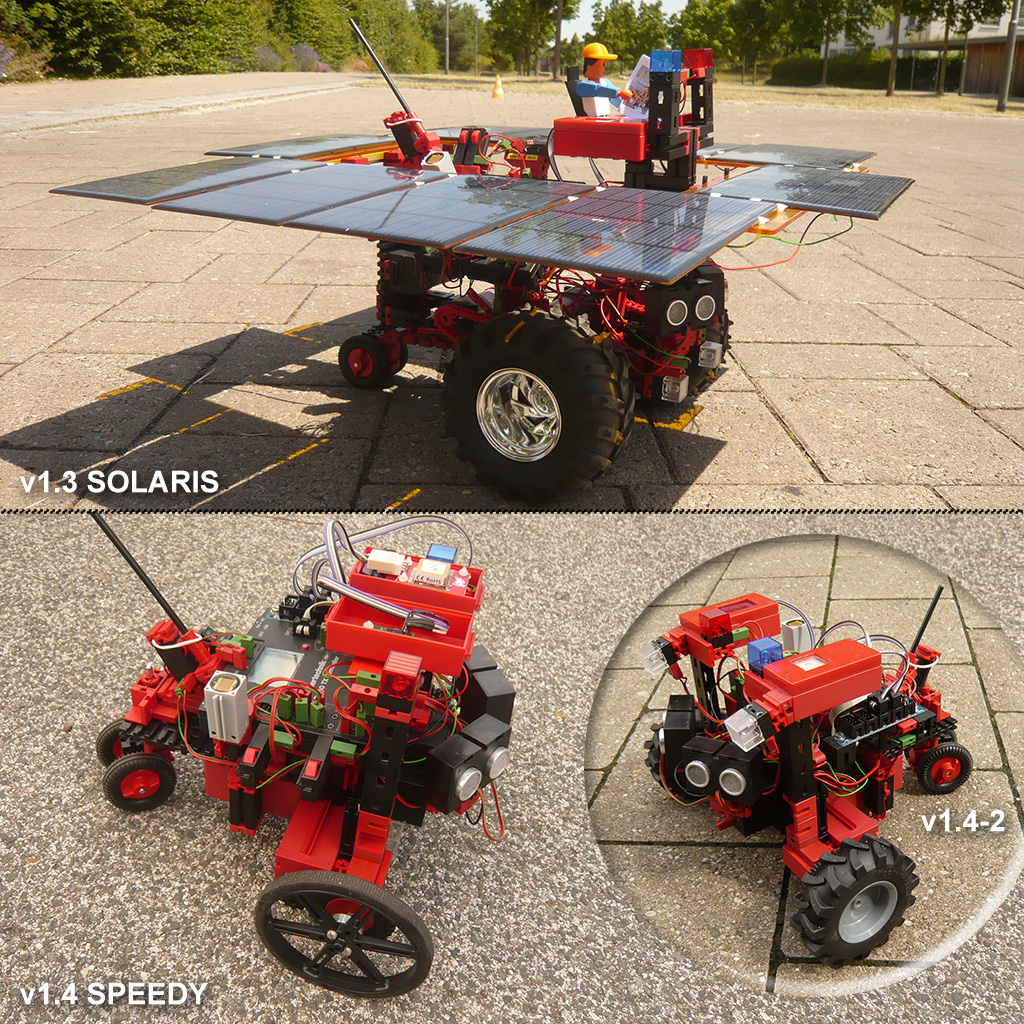
Für die Solarversion (10 Solarzellen zu je 9V 200mA) musste ein etwas leichter zu lenkender und weniger stromfressender "zweirädriger" Antrieb her (mit Power-Motoren). Und wo wir schon dabei waren haben wir noch eine Speed-Version erprobt, bei der zwei Encoder-Motoren zum Einsatz kommen. Leider sind beide Modelle nicht mehr so "Off-Road"-tauglich ;-)
Ein Video mit ein paar Impressionen gibt es hier:
http://youtu.be/uFmPIDPDnZs
Die zugehörigen RoboPro-Programme liegen in der FT-Community unter "Downloads/RoboPro" bereit zum runterladen.
http://ftcommunity.de/data/downloads/ro ... er_v11.zip
Da wir schon ein paar Mal das Compass-Modul CMPS10 kalibrieren mussten gibt es hier auch gleich das entsprechende Programm dafür.
Übrigens stand bisher die "Zielgenauigkeit" nicht an oberster Priorität, sondern der Spaß daran, daß es und wie es prinzipiell funktioniert. Verbesserungsvorschläge werden aber gerne entgegengenommen ...
@Dirk: bin schon auf deinen GPS-Roboter gespannt - vielleicht gibt es ja mal die Gelegenheit der gemeinsamen Ausfahrt !
wir haben weitere Modifikationen des Fahrroboters getestet:

Für die Solarversion (10 Solarzellen zu je 9V 200mA) musste ein etwas leichter zu lenkender und weniger stromfressender "zweirädriger" Antrieb her (mit Power-Motoren). Und wo wir schon dabei waren haben wir noch eine Speed-Version erprobt, bei der zwei Encoder-Motoren zum Einsatz kommen. Leider sind beide Modelle nicht mehr so "Off-Road"-tauglich ;-)
Ein Video mit ein paar Impressionen gibt es hier:
http://youtu.be/uFmPIDPDnZs
Die zugehörigen RoboPro-Programme liegen in der FT-Community unter "Downloads/RoboPro" bereit zum runterladen.
http://ftcommunity.de/data/downloads/ro ... er_v11.zip
Da wir schon ein paar Mal das Compass-Modul CMPS10 kalibrieren mussten gibt es hier auch gleich das entsprechende Programm dafür.
Übrigens stand bisher die "Zielgenauigkeit" nicht an oberster Priorität, sondern der Spaß daran, daß es und wie es prinzipiell funktioniert. Verbesserungsvorschläge werden aber gerne entgegengenommen ...
@Dirk: bin schon auf deinen GPS-Roboter gespannt - vielleicht gibt es ja mal die Gelegenheit der gemeinsamen Ausfahrt !
Zuletzt geändert von fantogerch am 13 Jul 2014, 13:56, insgesamt 1-mal geändert.
+grussvongeorg
Re: GPS-Navigation mit dem TX
Moin,
ich hoffe, dass du an deinen Solarzellen eine Spannungsbegrenzung verbaut hast - Solarzellen haben die unangenehme Eigenschaft, auf nicht verbrauchten Strom durch eine Erhöhung der Spannung zu reagieren. Wenn die Spannung wesentlich über die 12V hinausgeht, könnte es unangenehm werden.
ich hoffe, dass du an deinen Solarzellen eine Spannungsbegrenzung verbaut hast - Solarzellen haben die unangenehme Eigenschaft, auf nicht verbrauchten Strom durch eine Erhöhung der Spannung zu reagieren. Wenn die Spannung wesentlich über die 12V hinausgeht, könnte es unangenehm werden.
Gruß
Thomas
Thomas
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: GPS-Navigation mit dem TX
Hallo Thomas, hallo Ford,
danke für eure Hinweise - da offenbart sich wieder unser "jugendlicher Leichtsinn" einfach mal was auszuprobieren und zu sehen was passiert ...
Unsere Überlegung: "wo 9 Volt drauf steht kommt auch nicht mehr als 9 Volt raus" - und weniger schadet ja nicht ... (falsch gedacht - siehe weiter unten Nachrag_2)
Wir hatten bevor wir die Solarzellen mit dem TX-C verbunden haben natürlich mit einem digitalen Voltmeter gemessen, welche Spannnung ohne Last bei hellem Sonnenschien abzulesen ist - wenn ich mich recht erinnere war das etwas über 9 Volt (Mitte Februar). Die angegebene Leerlaufspannung beträgt ja schließlich 9 Volt und alle Elemente liegen parallel. Wie können denn da Spannungen jenseits von 12 Volt erreicht werden ?
Hm - ich denke damit werden wir uns wohl noch ein wenig intensiver beschäftigen müssen.
Wenn jemand eine "einfache" Bastelanleitung hätte wäre das ein prima Sommerferienprojekt ...
Nachtrag_1: oder reicht da (um es einfach zu halten) eine Zenerdiode in Sperrichtung geschalten mit einer Zenerspannung von z.B. 10 V und P(tot) 5 Watt ?
Nachrag_2: heute (im Hochsommer bei fast Sonnenhöchststand) war die gemessene Leerlaufspannung 10,4 V -> wieder was gelernt ...
danke für eure Hinweise - da offenbart sich wieder unser "jugendlicher Leichtsinn" einfach mal was auszuprobieren und zu sehen was passiert ...
Unsere Überlegung: "wo 9 Volt drauf steht kommt auch nicht mehr als 9 Volt raus" - und weniger schadet ja nicht ... (falsch gedacht - siehe weiter unten Nachrag_2)
Wir hatten bevor wir die Solarzellen mit dem TX-C verbunden haben natürlich mit einem digitalen Voltmeter gemessen, welche Spannnung ohne Last bei hellem Sonnenschien abzulesen ist - wenn ich mich recht erinnere war das etwas über 9 Volt (Mitte Februar). Die angegebene Leerlaufspannung beträgt ja schließlich 9 Volt und alle Elemente liegen parallel. Wie können denn da Spannungen jenseits von 12 Volt erreicht werden ?
Hm - ich denke damit werden wir uns wohl noch ein wenig intensiver beschäftigen müssen.
Wenn jemand eine "einfache" Bastelanleitung hätte wäre das ein prima Sommerferienprojekt ...
Nachtrag_1: oder reicht da (um es einfach zu halten) eine Zenerdiode in Sperrichtung geschalten mit einer Zenerspannung von z.B. 10 V und P(tot) 5 Watt ?
Nachrag_2: heute (im Hochsommer bei fast Sonnenhöchststand) war die gemessene Leerlaufspannung 10,4 V -> wieder was gelernt ...
+grussvongeorg
Re: GPS-Navigation mit dem TX
Moin,
bei 10,4V (auch bei 12V) würde ich mir noch keine Sorgen machen, so viel Toleranz machen die ft-Produkte schon mit. Einen Überspannungsschutz über 12V würde ich mir schon gönnen, z.B. eine Suppressor-Diode.
Schonmal nachgemessen, was passiert, wenn die Solarzellen belastet werden? Nach meiner Erfahrung brechen die relativ schnell ein, denn Leerlaufspannung entspricht nicht Nennspannung. Bei mehreren parallel geschaltet könnte es aber funktionieren (Zum Beispiel habe ich für mein 12V-Batterieladegerät eine Solarzelle mit einer Nennspannung von 21V verwendet, die Leerlaufspannung liegt dann bei 29V). Ich würde die Solarzellen aber nicht direkt parallel schalten, sondern jede für sich mit einer Diode anschließen - falls eine mal abgeschattet wird, könnte das dazu führen, dass sie eine Rückspannung bekommt, und das mögen Solarzellen AFAIK auch nicht. Hier Schottky-Dioden verwenden, die können ruhig ordentlich überdimensioniert sein (2..5A), damit der Spannungsabfall möglichst klein wird.
Die Version von Ford mit Akku-Pufferung ist natürlich der Idealfall, dann kann man auch mal eine wolkige Phase überstehen.
bei 10,4V (auch bei 12V) würde ich mir noch keine Sorgen machen, so viel Toleranz machen die ft-Produkte schon mit. Einen Überspannungsschutz über 12V würde ich mir schon gönnen, z.B. eine Suppressor-Diode.
Schonmal nachgemessen, was passiert, wenn die Solarzellen belastet werden? Nach meiner Erfahrung brechen die relativ schnell ein, denn Leerlaufspannung entspricht nicht Nennspannung. Bei mehreren parallel geschaltet könnte es aber funktionieren (Zum Beispiel habe ich für mein 12V-Batterieladegerät eine Solarzelle mit einer Nennspannung von 21V verwendet, die Leerlaufspannung liegt dann bei 29V). Ich würde die Solarzellen aber nicht direkt parallel schalten, sondern jede für sich mit einer Diode anschließen - falls eine mal abgeschattet wird, könnte das dazu führen, dass sie eine Rückspannung bekommt, und das mögen Solarzellen AFAIK auch nicht. Hier Schottky-Dioden verwenden, die können ruhig ordentlich überdimensioniert sein (2..5A), damit der Spannungsabfall möglichst klein wird.
Die Version von Ford mit Akku-Pufferung ist natürlich der Idealfall, dann kann man auch mal eine wolkige Phase überstehen.
Gruß
Thomas
Thomas
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: GPS-Navigation mit dem TX
Hallo Thomas,
freu mich sehr über Deine hilfreichen Tipps - Mark ebenso!
Die Überspannungsschutzdiode (Suppressor-Diode) werden wir schnellstens nachrüsten - und auch die Schottky-Dioden (die waren bei den Solarzellen mit dabei) werden wie von dir vorgeschlagen wegen der Abschattung zum Einsatz kommen. Bisher war nur eine Diode für alle Solarzellen verbaut.
Eigentlich könnte man doch dann den FT-Accu als Puffer mit dranklemmen, oder nicht?
Die Solarzellen-Version war eh mehr ein Versuchsballon als "Machbarkeitsstudie". Ist ehrlich gesagt ein wenig unhandlich ...
Weltmeisterliche Grüße !
freu mich sehr über Deine hilfreichen Tipps - Mark ebenso!
Die Überspannungsschutzdiode (Suppressor-Diode) werden wir schnellstens nachrüsten - und auch die Schottky-Dioden (die waren bei den Solarzellen mit dabei) werden wie von dir vorgeschlagen wegen der Abschattung zum Einsatz kommen. Bisher war nur eine Diode für alle Solarzellen verbaut.
Eigentlich könnte man doch dann den FT-Accu als Puffer mit dranklemmen, oder nicht?
Die Solarzellen-Version war eh mehr ein Versuchsballon als "Machbarkeitsstudie". Ist ehrlich gesagt ein wenig unhandlich ...
Weltmeisterliche Grüße !
+grussvongeorg
Re: GPS-Navigation mit dem TX
Hallo Dirk,
Kompliment für deinen GPS Treiber.
ich habe den Treiber in Kombination mit dem CRIUS NEO-6 V3.1 GPS Module + dem I2C-GPS NAV Module V1.1 (beinhaltet den ATMega 328P Microcontroller) getestet, jedoch leider nicht erfolgreich. Die I2C Adresse von diesem Modul ist auch die 0x20. Die GPS Version vom Register 0x03 zeigt er auch richtig an (21). Jedoch bleibt er immer im UP "ReadGPSSTatus" beim Lesen von 0x00 hängen. Alle weiteren I2C befehle laufen fehlerfrei durch, jedoch Werte werden keine angezeigt.
Leider konnte ich kein Datenblatt finden bezüglich Registerdefinition von diesem Sensor. Welche Infos hast du verwendet für deinen Treiber? Ich hatte auch C-Codes von diesem Modul durchgeschaut, da stimmte auf den ersten Blick die Registerdefinition mit deinem Treiber überein.
Hast du einen Tipp wie man den GPS Sensor mit Robopro zum Laufen bekommt?
Kompliment für deinen GPS Treiber.
ich habe den Treiber in Kombination mit dem CRIUS NEO-6 V3.1 GPS Module + dem I2C-GPS NAV Module V1.1 (beinhaltet den ATMega 328P Microcontroller) getestet, jedoch leider nicht erfolgreich. Die I2C Adresse von diesem Modul ist auch die 0x20. Die GPS Version vom Register 0x03 zeigt er auch richtig an (21). Jedoch bleibt er immer im UP "ReadGPSSTatus" beim Lesen von 0x00 hängen. Alle weiteren I2C befehle laufen fehlerfrei durch, jedoch Werte werden keine angezeigt.
Leider konnte ich kein Datenblatt finden bezüglich Registerdefinition von diesem Sensor. Welche Infos hast du verwendet für deinen Treiber? Ich hatte auch C-Codes von diesem Modul durchgeschaut, da stimmte auf den ersten Blick die Registerdefinition mit deinem Treiber überein.
Hast du einen Tipp wie man den GPS Sensor mit Robopro zum Laufen bekommt?
Dirk Fox hat geschrieben:Hallo zusammen,
heute ist mir die erste exakte Positionsbestimmung mit dem GPS-Sensor GTPA010 (I²C-Board NAVIGATRON v2 von Flytron, http://www.flytron.com/sensors/180-i2c- ... thers.html) am TX gelungen.
Zuletzt geändert von chehr am 28 Jan 2016, 21:50, insgesamt 1-mal geändert.
-
Dirk Fox
- ft:pedia-Herausgeber
- Beiträge: 1833
- Registriert: 01 Nov 2010, 00:49
- Wohnort: Karlsruhe
- Kontaktdaten:
Re: GPS-Navigation mit dem TX
Hallo Christian,
den Treiber habe ich durch ziemlich fummeliges, schrittweises "reverse engineering" aus dem Code der firmware des Sensors entwickelt;
ein Datenblatt gab (und gibt es) für den Sensor leider nicht. Inwieweit die firmware mit der Deines CRIUS NEO-6 v3.1 GPs Module übereinstimmt, kann ich nicht sagen.
Wenn das Programm bei "ReadGPSStatus" hängt, dann ist die einzige mögliche Ursache, dass dort protokollseitig etwas nicht stimmt: Ich lasse den Lesebefehl warten, bis er eine Antwort bekommt.
Dass die anderen Register (noch) keine Werte enthalten, ist nicht weiter verwunderlich - erst wenn er einen 2D- oder 3D-Fix hat, bestimmt er die Koordinaten. Das kann übrigens beim ersten Mal durchaus eine Weile dauern - Sichtkontakt zu den Satelliten ist wärmstens zu empfehlen.
Ich habe hier einen um weitere Funktionen ergänzten Treiber (v1.3), der aber noch nicht fertig durchgetestet ist, daher habe ich ihn bisher nicht hochgeladen... In den entscheidenden Befehlen ist er jedoch identisch, er dürfte Dir also auch nicht helfen. Versuchsweise solltest Du einmal die Protokollgeschwindigkeit auf 100 kHz korrigieren - vielleicht genügt das schon.
Nutzt Du den Treiber am TX oder am TXT? Bei letzterem gab es ja auch mit meinem Pixy-Treiber Probleme, der am TX anstandslos lief - so muss man die meisten "Keep Open"-Kommandos herausnehmen, und möglicherweise gibt es auch hardwareseitige Ursachen wie die Pullups (siehe das jüngste Posting von Helmut zur Pixy).
Vielleicht helfen Dir aber auch diese Hinweise hier zu Deinem Sensor Modul.
Beste Grüße,
Dirk
den Treiber habe ich durch ziemlich fummeliges, schrittweises "reverse engineering" aus dem Code der firmware des Sensors entwickelt;
ein Datenblatt gab (und gibt es) für den Sensor leider nicht. Inwieweit die firmware mit der Deines CRIUS NEO-6 v3.1 GPs Module übereinstimmt, kann ich nicht sagen.
Wenn das Programm bei "ReadGPSStatus" hängt, dann ist die einzige mögliche Ursache, dass dort protokollseitig etwas nicht stimmt: Ich lasse den Lesebefehl warten, bis er eine Antwort bekommt.
Dass die anderen Register (noch) keine Werte enthalten, ist nicht weiter verwunderlich - erst wenn er einen 2D- oder 3D-Fix hat, bestimmt er die Koordinaten. Das kann übrigens beim ersten Mal durchaus eine Weile dauern - Sichtkontakt zu den Satelliten ist wärmstens zu empfehlen.
Ich habe hier einen um weitere Funktionen ergänzten Treiber (v1.3), der aber noch nicht fertig durchgetestet ist, daher habe ich ihn bisher nicht hochgeladen... In den entscheidenden Befehlen ist er jedoch identisch, er dürfte Dir also auch nicht helfen. Versuchsweise solltest Du einmal die Protokollgeschwindigkeit auf 100 kHz korrigieren - vielleicht genügt das schon.
Nutzt Du den Treiber am TX oder am TXT? Bei letzterem gab es ja auch mit meinem Pixy-Treiber Probleme, der am TX anstandslos lief - so muss man die meisten "Keep Open"-Kommandos herausnehmen, und möglicherweise gibt es auch hardwareseitige Ursachen wie die Pullups (siehe das jüngste Posting von Helmut zur Pixy).
Vielleicht helfen Dir aber auch diese Hinweise hier zu Deinem Sensor Modul.
Beste Grüße,
Dirk
Re: GPS-Navigation mit dem TX
Hallo Dirk,
vielen Dank für deine Hilfestellung,
mit dieser Info bin ich zum Ergebnis gekommen das die Register von Dir mit meinem Board (I2C-GPS NAV Module V1.1) übereinstimmen. Somit müsste das RoboPro Programm auch mit dem CRIUS NEO-6 V3.1 GPS funktionieren.
Bisher habe ich leider noch kein GPS Signal bekommen, allerding war der Sensor bisher immer am Dachfenster (ich habe mein Akkupack in einem anderen Modell verbaut...).
Wenn ich mal Zeit habe versuche ich es noch im Freien - falls das nicht geht denke ich, das er defekt ist.
Gruß
Christian
vielen Dank für deine Hilfestellung,
mit dieser Info bin ich zum Ergebnis gekommen das die Register von Dir mit meinem Board (I2C-GPS NAV Module V1.1) übereinstimmen. Somit müsste das RoboPro Programm auch mit dem CRIUS NEO-6 V3.1 GPS funktionieren.
Bisher habe ich leider noch kein GPS Signal bekommen, allerding war der Sensor bisher immer am Dachfenster (ich habe mein Akkupack in einem anderen Modell verbaut...).
Wenn ich mal Zeit habe versuche ich es noch im Freien - falls das nicht geht denke ich, das er defekt ist.
Gruß
Christian
-
fantogerch
- Beiträge: 42
- Registriert: 26 Jan 2011, 22:12
- Wohnort: Erlangen
Re: GPS-Navigation mit dem TX
Hallo Christian,
ich habe ebenso wie Dirk das Navigatron-Modul von Flytron in Gebrauch (geht direkt mit i2c). Man kann dieses aber auch seriell betreiben, und da ich auch so ein i2c-GPS-NAV Modul in meinem Fundus habe wollte ich das mal ausprobieren. Bei mir wurden auch keine Werte angezeigt.
Im Arduino-Sketch habe ich gesehen, dass nicht das NMEA-Protokoll aktiviert war sondern UBLOX. Auch die Baud-Rate habe ich einheitlich auf 115200 gesetzt. Nach diesen Änderungen im Sketch und Upload (in der Arduino-Umgebung) funktioniert das nun mit meinem TXC wie gewünscht. Übrigens musste ich RX des NavModuls an RX des GPS-Moduls und TX an TX anschliessen. Das wurde auch schon von anderen so beschrieben (http://quadrixtrem.blogspot.de/2013/08/ ... s-nav.html -> ein Stückchen nach unten scrollen zu "1.Étape"...)
Vielleicht hilft Dir das weiter.
+grussvongeorg
ich habe ebenso wie Dirk das Navigatron-Modul von Flytron in Gebrauch (geht direkt mit i2c). Man kann dieses aber auch seriell betreiben, und da ich auch so ein i2c-GPS-NAV Modul in meinem Fundus habe wollte ich das mal ausprobieren. Bei mir wurden auch keine Werte angezeigt.
Im Arduino-Sketch habe ich gesehen, dass nicht das NMEA-Protokoll aktiviert war sondern UBLOX. Auch die Baud-Rate habe ich einheitlich auf 115200 gesetzt. Nach diesen Änderungen im Sketch und Upload (in der Arduino-Umgebung) funktioniert das nun mit meinem TXC wie gewünscht. Übrigens musste ich RX des NavModuls an RX des GPS-Moduls und TX an TX anschliessen. Das wurde auch schon von anderen so beschrieben (http://quadrixtrem.blogspot.de/2013/08/ ... s-nav.html -> ein Stückchen nach unten scrollen zu "1.Étape"...)
Vielleicht hilft Dir das weiter.
+grussvongeorg
+grussvongeorg
Re: GPS-Navigation mit dem TX
Hallo Christian,
ich habe ein cirus neo-6 gps und ein cirus i2c-gps nav module. Leider werde ich aus dem thred nicht schlau welche firmware ich auf das nav module spielen soll?
Kannst Du mir da weiterhelfen?
Wenn ich das richtig verstanden habe können dann die gps daten mit dem TXT ausgelesen werden? Richtig?
Danke
Richard
ich habe ein cirus neo-6 gps und ein cirus i2c-gps nav module. Leider werde ich aus dem thred nicht schlau welche firmware ich auf das nav module spielen soll?
Kannst Du mir da weiterhelfen?
Wenn ich das richtig verstanden habe können dann die gps daten mit dem TXT ausgelesen werden? Richtig?
Danke
Richard
Re: GPS-Navigation mit dem TX
Hallo Georg,
vielen Dank für deinen Tipp.
Nachdem ich via FTDI die Serial Band Breite auf 115200 im CIRIUS NEA-6 Board geändert hatte, funktioniert es.
Dazu habe ich das Programm u-center verwendet, über Hotkey: F9, dann UBX/CFG/PRT selektiert. Dannach die Baudrate auf 115200 geändert und auf das Board via "Send" Befehl beschrieben. Danach den Parameter noch in den non-volatilen Speicher geschrieben (BBR/Flash)
Das Programm und die Anleitung dazu ist unter folgendem Link frei verfügbar.
https://www.u-blox.com/de/product/u-center-windows
Das NMEA Protokol war bereits aktiv, da musste man keine Änderungen vornehmen.
Der FTDI wird über USB mit dem PC verbunden und direkt mit dem CIRIUS NEA-6 Board. Das I2C-GPS NAV Module V1.1 ist wärend dieser Aktion nicht verbunden.
Richard, ja die GPS daten können dann via TXT und TX ausgelesen werden. Der I2C-GPS NAV Module V1.1 benötigt 5V, d.h. du kannst es direkt an den TX anschließen. Am TXT nur mit einer eigenen Spannungsversorgung und Level Shifter.
Gruß
Christian
vielen Dank für deinen Tipp.
Nachdem ich via FTDI die Serial Band Breite auf 115200 im CIRIUS NEA-6 Board geändert hatte, funktioniert es.
Dazu habe ich das Programm u-center verwendet, über Hotkey: F9, dann UBX/CFG/PRT selektiert. Dannach die Baudrate auf 115200 geändert und auf das Board via "Send" Befehl beschrieben. Danach den Parameter noch in den non-volatilen Speicher geschrieben (BBR/Flash)
Das Programm und die Anleitung dazu ist unter folgendem Link frei verfügbar.
https://www.u-blox.com/de/product/u-center-windows
Das NMEA Protokol war bereits aktiv, da musste man keine Änderungen vornehmen.
Der FTDI wird über USB mit dem PC verbunden und direkt mit dem CIRIUS NEA-6 Board. Das I2C-GPS NAV Module V1.1 ist wärend dieser Aktion nicht verbunden.
Richard, ja die GPS daten können dann via TXT und TX ausgelesen werden. Der I2C-GPS NAV Module V1.1 benötigt 5V, d.h. du kannst es direkt an den TX anschließen. Am TXT nur mit einer eigenen Spannungsversorgung und Level Shifter.
Gruß
Christian
Zuletzt geändert von chehr am 30 Mär 2016, 21:33, insgesamt 1-mal geändert.
-
Poisonspider
- Beiträge: 14
- Registriert: 28 Mär 2016, 22:02
Re: GPS-Navigation mit dem TX
Hey
Die Idee mit dem Roboter finde ich
sehr gut und ich beobachte dieses Projekt auch intensiv.
Ich würde auch gerne helfe, kann aber nicht, da meine
Kenntnisse sich nicht auf dem Expertenstand befinden. Deshalb bitte ich
euch den Code (wenn möglich) zu veröffentlichen oder zum
download zu stellen, da es bestimmt Interresant ist
sich den Code anzuschauen und ihn zu analysieren.
Danke
mfG Poisonspider
Die Idee mit dem Roboter finde ich
sehr gut und ich beobachte dieses Projekt auch intensiv.
Ich würde auch gerne helfe, kann aber nicht, da meine
Kenntnisse sich nicht auf dem Expertenstand befinden. Deshalb bitte ich
euch den Code (wenn möglich) zu veröffentlichen oder zum
download zu stellen, da es bestimmt Interresant ist
sich den Code anzuschauen und ihn zu analysieren.
Danke
mfG Poisonspider
Mein Name ist normalerweise Giftspinne aber der Name ist gesperrt
Re: GPS-Navigation mit dem TX
Hallo Poisonspider,
das Programm vom Roboter gibt es unter folgendem Link
das Programm vom Roboter gibt es unter folgendem Link
fantogerch hat geschrieben:
Die zugehörigen RoboPro-Programme liegen in der FT-Community unter "Downloads/RoboPro" bereit zum runterladen.
http://ftcommunity.de/data/downloads/ro ... er_v11.zip
-
Dirk Fox
- ft:pedia-Herausgeber
- Beiträge: 1833
- Registriert: 01 Nov 2010, 00:49
- Wohnort: Karlsruhe
- Kontaktdaten:
Re: GPS-Navigation mit dem TX
Hallo Posionspider,
Beste Grüße,
Dirk
Der I²C-Treiber für den Navigatron-GPS-Sensor ist ausführlich in der ft:pedia 3/2013 (S. 54-62) beschrieben, den RoboPro-Treiber gibt es im Downloadbereich der ft:c.Poisonspider hat geschrieben:Deshalb bitte ich euch den Code (wenn möglich) zu veröffentlichen oder zum download zu stellen, da es bestimmt Interresant ist sich den Code anzuschauen und ihn zu analysieren.
Beste Grüße,
Dirk
-
Poisonspider
- Beiträge: 14
- Registriert: 28 Mär 2016, 22:02
Re: GPS-Navigation mit dem TX
Hey
ich meinte eigentlich zukünftige
Versionen des Programmes und nicht die jetzt schon
vorhandene Version, die ich natürlich schon
gedownloaded habe. Viele Leute erzählen von
ihren Programmen und stellen leider keinen
Downloadlink zur verfügung.
mfG
ich meinte eigentlich zukünftige
Versionen des Programmes und nicht die jetzt schon
vorhandene Version, die ich natürlich schon
gedownloaded habe. Viele Leute erzählen von
ihren Programmen und stellen leider keinen
Downloadlink zur verfügung.
mfG
Mein Name ist normalerweise Giftspinne aber der Name ist gesperrt